Understanding Periodic Motion
Periodic motion is characterized by oscillations that repeat themselves over time, moving back and forth around an equilibrium position. Classic examples include the mass-spring system and the simple pendulum. For a broader context on related foundational concepts, see Understanding Motion: A Comprehensive Guide.
Mass-Spring System Essentials
- Setup: A spring attached to a wall and a mass initially at equilibrium.
- Displacement (x): Moving the mass from equilibrium either stretches or compresses the spring.
- Restoring Force: A force exerted by the spring, always directed towards the equilibrium position, opposing the displacement.
Hooke's Law
Restoring force, (F_r), follows Hooke’s Law: [ F_r = -kx ] where:
- (k): spring constant (N/m), representing stiffness.
- (x): displacement from equilibrium (m). The negative sign indicates the force opposes displacement.
Spring Constant (k)
- Indicates stiffness; larger (k) means harder to stretch/compress.
- Calculated as ( k = \frac{F}{x} ) when force and displacement are known.
Energy in Oscillations
- Potential Energy (PE): ( U = \frac{1}{2}kx^2 ) stored when the spring is stretched or compressed.
- Kinetic Energy (KE): ( K = \frac{1}{2}mv^2 ) depends on the velocity of the mass.
- Mechanical Energy (ME): Sum of KE and PE, constant if frictionless.
Motion Characteristics
- At maximum displacement: velocity is zero, acceleration and force are at maximum.
- At equilibrium: velocity is maximum, acceleration and force are zero.
Velocity and Acceleration Equations
- Position: ( x(t) = A \cos(2\pi ft) )
- Velocity: ( v(t) = -A \cdot 2\pi f \sin(2\pi ft) )
- Acceleration: ( a(t) = -A \cdot (2\pi f)^2 \cos(2\pi ft) ) where (A) is amplitude and (f) is frequency.
Frequency and Period
- Period (T): Time for one full cycle.
- Frequency (f): Reciprocal of period, cycles per second (Hz).
- Relationship for spring-mass system: [ T = 2\pi \sqrt{\frac{m}{k}} \quad , \quad f = \frac{1}{T} = \frac{1}{2\pi} \sqrt{\frac{k}{m}} ]
Effects of Damping
- Damping caused by friction reduces amplitude over time.
- Types:
- Underdamped: Oscillations decrease gradually.
- Overdamped: No oscillations; system slowly returns to equilibrium.
- Critically damped: Returns to equilibrium fastest without oscillating.
Resonance
- Occurs when an external force matches the system’s natural frequency.
- Leads to amplified oscillations, demonstrated by pushing a swing at its natural frequency.
Practical Problem Solving
- Use ( F = kx ) to find forces or displacements.
- Calculate work and energy using ( W = \frac{1}{2}kx^2 ).
- Derive maximum velocity ( v_{max} = A \sqrt{\frac{k}{m}} ) and maximum acceleration ( a_{max} = \frac{k}{m} A ).
- Analyze changes in period and frequency when varying mass or spring constant.
Summary
This guide covers the physics of periodic motion, emphasizing how mass-spring systems demonstrate simple harmonic motion, energy transformations, and the mathematical relationships governing oscillations. For an extended perspective integrating oscillation concepts in physics, explore the Comprehensive Overview of Oscillation in Edexcel IAL Unit 5. Understanding these principles equips you to analyze and predict system behavior in engineering and physics contexts effectively.
So what exactly is periodic motion? Periodic motion is motion that repeats itself or that oscillates back and
forth. Some good examples of periodic motion and simple harmonic motion is the mass spring system and also the simple
pendulum. But let's talk about the mass spring system. So let's say this is the wall and we have a spring connected to a
mass horizontally and let's say that this is the equilibrium position of the spring.
So the spring has been stretched towards the right. So that means we're applying a force
to pull it towards the right to stretch it from its equilibrium position. As we pull it towards the right,
there is another force that wants to push it back towards its equilibrium position. This is known as the restoring
force. Now once you let go, the spring is going to move back towards
the left. Now it's not going to stop at the equilibrium position. It's going to move past it.
And once that happens, it's going to bounce back the other direction.
So it's going to move back and forth towards the left and towards the right and as it oscillates back and forth
you have simple harmonic motion or periodic motion. Now according to Hook's law the
restoring force is equal to * K * X.
X is the distance measured from the equilibrium position. So let's say this
is the wall and we have a spring and here's the block of mass m. The distance between where the spring is
located and the equilibrium position is x. At the middle at the equilibrium position x is zero. So the restoring
force will always be zero at the equilibrium position. K is known as the spring constant and K
has the units newtons per meter. So let's say if you have a spring constant of 100 newtons per meter, what
that means is that it requires 100 newtons of force to either stretch or compress the spring by 1 meter from its
equilibrium position. So if you wish to stretch it by 2 m, it requires 200 newtons of force.
So if you have a very stiff spring that's hard to compress, the K constant is very high. Let's say if K is a
th00and. So for this spring, it requires 1,000 newtons of force just to stretch it by
one meter. So this spring is going to be very stiff. It's hard to stretch or compress.
This particular spring is going to be easy to stretch or compress compared to the other one. So, this spring is
relatively loose. By the way, before we work on some practice problems, I do want to mention
one thing. Any equation in Hook's law, why is there a negative symbol for the restoring force?
Why do we have this negative sign? What's the reason for that? So notice that if you apply a force
towards the right to stretch the spring, the displacement vector will be towards the right and the restoring force is
towards the left. Because the restoring force is opposite to the displacement vector,
F_sub_R is negative because it's always opposite to the direction of motion. The restoring force will always act in
such a way to bring the object back to its equilibrium position. So if the equil position is here, the restoring
force wants to bring it to the left. Likewise, Let's say if the spring is compressed,
the restoring force wants to uh move it towards the right back to its equilibrium position. And
remember at the equilibrium position, the restoring force is zero since x is equal to zero and f_sub_r is kx. So k *
0 is zero. Let's work on some practice problems. How much force is required to stretch a
300 Newton per meter spring by 25 cm? So let's use the equation F is equal to kx.
And let's not worry about the negative sign. If you see the unit newtons per meter,
that tells you that that value represents the spring constant, which is 300 newtons per meter. And since it has
the unit meters in it, that tells us that we need to convert centimeters into meters.
It turns out that 100 cm is equal to a single meter. So to convert it we need to divide by
100 or move the decimal two units to the left. So this is equal to 0.25 m which
is the value of x. So what is 300 * 0.25 or what is 25% of 300?
This is going to be about 75. So that is the force required to stretch the spring by 25 cm.
How far can you compress the spring with a force of 150 newtons? Now let's think about this. It required
75 newtons to stretch the spring by 25 cm. It also requires 75 newtons to compress
the spring by 25 cm. So if we double the force to 150, the amount that we can stress, I mean
stretch or compress the spring is going to be twice the value. It's going to be 50 cm.
F= kx. If you double the distance, if you stretch it by two times the amount, the
force will increase by a factor of two. Likewise, if you double the force, you can double the distance that you stretch
or compress the spring bar. Now, for those of you who prefer to use an equation,
you can use this. Let's divide f_sub_2 by f_sub_1. f_sub_1 is equal to k * x1 and f_sub_2
is k * x2. Since we're dealing with the same spring, K is the same. So, as you can see, the force is
proportional to x. Let's say f_sub_1
is 75 newtons and we're looking for f_sub_2. X1. The distance that corresponds to 75
is 25 cmters. Actually, we're not looking for F2. We have F2. F2 is 150.
We're looking for X2. 150 / 75 is 2. And at this point, we can cross
multiply. So x2 is equal to 2 * 25 which is 50. Here's another problem. It takes 200
newtons to stretch a spring by 40 cm. How much force is required to stretch a spring by 120 cm?
So 40 cm corresponds to a force of 200 newtons. What is the force that's required to
triple the distance by a factor of three? If you triple the distance by a factor
of three, the force is going to increase by a factor of 3. So the force that's required is 600 newtons. Again, you can
use this equation. F_sub_2 over F_sub_1 is equal to X2 / X1. So we're looking for F_sub_2 this time. f_sub_1 is 200
newtons. X1 is 40 cm and X2 is 120 cmters. You don't need to convert the units to
meters because the unit centimeters will cancel. So 120 / 40 is 3.
So therefore f_sub_2 / 200 is equal to 3. And if we multiply both sides by 200, we can see that F_sub_2 is going to be 3
* 200, which is 600 newtons. So that's how much force is required to stretch a spring by 120
cm. Now what about the second part to the question? What is the value of the
spring constant? So using the formula F is equal to Kx. Solving for K, K is equal to the force /
the spring constant. So we can use the force of 200 newtons. And instead of using 40 cm, we need to convert it to
meters. So that's about 4 m. 200 /4
is equal to 500. So the spring constant is 500 newtons per meter. So to stretch the spring by a distance of 1 meter
requires a force of 500 newtons. Now what about the last part of the problem? How much work is required to
stretch a spring by 120 cm. Work is equal to force times displacement
which displacement could be represented as X. Now this is if you have a constant
force. Now what about if the force is a variable force? Example,
in this case, work is equal to the integral of f * dx, where f is a function of x.
And we know f is equal to k * x, ignoring the negative sign. So work is equal to the anti-derivative
of k * x dx. To find the anti-derivative of kx, add one to the exponent and divide by that
number. The anti-derivative of x^ the 1st power is x^2 / 2.
So the work required to stretch a spring is going to be basically 12 kx^ 2. This is also the potential energy that is
stored in a spring. In some textbooks, you'll see this U symbol. This is the elastic potential
energy of a spring. It's equal to 12 kx^2, which is the work required to stretch it
or compress it. So, k we know it's um 500 newtons per meter.
I'm going to write it like this. And x is going to be 120 cm, but we'll need to
convert it to meters. So, let's divide it by 100, which is 1.2 m squared. And the unit meters will cancel,
which leaves behind newtons time meters. There's 2 meters here. Since it's new time me is equal to the unit jewels.
Half of 500 is 250 * 1.2^2 is equal to 360. So it takes 360 jewels of work to
stretch this particular spring by 120 cm. Now let's go back to our mass spring
system slash oscillator. So let's say if we have a mass of m attached to a spring and let's say
this is the equilibrium position. Now, as we mentioned before, the force
required to stretch the spring is the apply force. And whenever you stretch it, there's
going to be a restoring force that pulls it back towards the left. Now, you also need to know that at this
point, the net force is zero. Now, this is only true while you're holding it. As soon as you release the
mass from rest, the applied force will disappear. At that point, the net force is equal to
the restoring force. And at this instant, as soon as you release it, this object has maximum
acceleration. And initially, the velocity is zero. The velocity reaches its maximum value
once it reaches equilibrium. At equilibrium, the restoring force is zero. And because the restoring force is
zero, the acceleration is equal to zero at the equilibrium position. However, because the velocity is at a maximum,
it's moving towards the left. So, because it has momentum, because it's moving due to inertia, it's going
to continue to move to the left, compressing the spring. As it begins to compress the spring,
a restoring force is going to build up, decelerating the object. Once the object reaches a velocity of
zero, the restor is at its maximum value, which means acceleration it's at its maximum value at this point
as well. So make sure you understand this that at the equilibrium position, the velocity is at its maximum and the
acceleration is zero. When it's fully stretched or compressed, the acceleration
is at its maximum value and the velocity is zero. Now, if no friction is present in a
system, this oscillator will continue to oscillate indefinitely. If there's friction, friction is going
to oppose motion. So, in the first picture, the object is moving towards the left. So the force of friction will
be directed towards the right. Now in the middle it's still moving towards
the left. So friction is still directed towards the right. And on the last picture because the velocity
is zero, friction will be zero since it's not moving instantaneously. But as it begins to move towards the right,
friction will oppose it. So friction always opposes motion. By the way, once you release it, there's
no friction until it begins moving towards the left. So, as it accelerates, friction is going to oppose it.
Whenever there's friction present, the oscillator will be dampened by it. The amplitude will gradually decrease.
Now, let's talk about X and A. at the equilibrium position. Let me draw a new picture.
So let's say if we have an oscillator and let's say this is the equilibrium position
x is equal to zero at the equilibrium position and let's say at this point x is equal
to one. So this is the maximum displacement. The maximum displacement is represented
by the symbol capital A. So in this case for this problem a is one. At this position X is.5
since it's to the right of the equilibrium position. And at this position X is.5.
So let's say K is 100 newtons per meter. What is the force the restoring force at let's say a position of.5
include the appropriate sign as well. So F is equal to kx it's going to be * 100 *.5
which is50. So at this point we have a force of -50. The negative
sign means that it's towards the left. Now what about at this position? If we plug in.5.
Okay, that does not look like a five. It's going to be *.5
which is pos 50. Since the object is moving at this location towards the left, the restoring
force is towards the right. And notice that the force is positive 50 because it's directed towards the right.
When the restoring force is directed towards the left, notice that it's negative.
Now, let's talk about the energy of this particular oscillator. When it's fully stretched and once you
release it, the acceleration is at its maximum and the velocity is zero. The kinetic energy of any moving object is
12 mv^ 2. So the kinetic energy is dependent on the speed. So when it's fully stretched or fully compressed,
let's say it's fully compressed at this position here, the kinetic energy is at a minimum because the velocity is
zero. So K is going to equal zero when it's fully stretched or compressed. Now at
the equilibrium position, the velocity is at a max. So therefore K is at its maximum value at the
equilibrium position. As we mentioned before the acceleration is zero at the equilibrium position and
the restoring force is equal to zero since X is zero and F= KX. So K * Z is zero.
Now what about the potential energy? The potential energy is at its maximum
when it's fully stretched or compressed. But at equilibrium, the potential energy is zero. The potential energy is equal
to 12 kx^ 2. Since x is zero at the equilibrium position, the potential energy is zero because 12 k * 0^ 2 is 0.
Now there's another thing that you need to be familiar with and that is mechanical energy.
The mechanical energy is the sum of the kinetic energy and the potential energy. Keep in mind
when the amplitude is one x can vary anywhere between -1 to 1. The mechanical energy depends on the
amplitude that is the maximum value of x or the maximum displacement. So the mechanical energy is 12 k a^ 2.
The kinetic energy is 12 mv ^2 and the potential energy is 12 kx^2. So whenever x is equal to a the
potential energy is the same as the mechanical energy at this point the kinetic energy is zero.
And whenever x is equal to zero that is at the equilibrium position potential energy is equal to zero. So
let me organize this information. So let's say this is the equilibrium position where x is zero.
At that point the potential energy will be equal to zero. So k is at its maximum. K equals the
mechanical energy. The mechanical energy of the system is constant if there's no friction.
The mechanical energy is the total energy of the system. Now, let's say if it's at the right, if
it's fully stretched at this point, the maximum displacement is equal to a.
So, when x is equal to a, the potential energy is at a maximum. it's equal to the mechanical energy which means that K
is equal to zero and when it's fully compressed P is still equal to the mechanical
energy and K is equal to zero. Now sometimes you may need to calculate the maximum acceleration and the maximum
velocity. What equations can we use to do that? So let's start with maximum velocity.
Now we said that it's going to be the velocity is going to be at its maximum when x is equal to
zero. So when x is equal to zero the potential energy is zero. So this disappears. So therefore 12 k a^2
is equal to 12 mv^2. We can multiply both sides by two to get rid of the fraction.
So k a^2 is equal to mv ^2. To isolate v ^2 we need to divide both sides by m.
So V is equal to the square root of K / M time the amplitude A.
So that's how you could find the maximum velocity if you ever need to. What about the acceleration? How can we
find a maximum acceleration? We know that f is equal to kx. And according to Newton's second law, F
is ma. So what we need to do is divide both sides by m. So k / m * x is equal to the
acceleration at any point. So that's the acceleration as a function of x.
Now the acceleration is at its maximum value when x is the maximum which is the amplitude.
So the maximum acceleration is k * a / m. Now what if we don't want to find the
maximum velocity? What if we need to find the velocity as a function of x? Let's say when x is 4.7. How can we do
that? Well, let's go back to our conservation of energy equation. Mechanical energy is equal to kinetic
plus potential energy. So, let's begin by multiplying everything by two.
2 * a half is 1. This will cancel all of the fractions. So we have k a^2 is equal to mv^2
+ kx^2. Now let's subtract kx^ 2 by both sides. k a^ 2us kx^2 is equal to m v^2. And now
let's factor out the gcf the greatest common factor which is k. So this is going to be a^2 - x^2.
Next, let's divide the expression by the mass. So, v ^ 2 is equal to k / m * a^ 2 -
x^2. Now, what's our next step? The next thing we need to do is take out
a I mean a^2 if we take out a^2 a^2 / a^2 is simply 1
and this / a^2 that's going to be x^2 / a^2. So now what we want to do is take the
square root of both sides. So the velocity as a function of x is going to be the square roo<unk> of k / m
* a* the square<unk> of 1 - x^ 2 / a^ 2. Now the velocity can be positive or
negative. If the velocity is moving towards the right it's positive. If it's moving towards the left it's negative.
Now if you recall the quantity<unk> km m * a is equal to the maximum velocity.
So therefore we can rewrite the equation like this. So the velocity as a function of x is equal to plus or minus the
maximum velocity times the square root of 1 - x^2 / a^ 2. So make sure you uh
write this equation down. It might be useful later. Now there's something else that we need
to talk about and that is the frequency and period of this spring mass oscillator.
So let's say this is the equilibrium position. Now as the spring
moves to the left and as it moves back to where it started from that is equal to one cycle.
The distance of one cycle is equal to basically four times the value of x.
So from here back to its equilibrium position, it travels a distance of x. And then when it's fully compressed, it
travels another distance of x. And then when it goes back to its equilibrium position, that's another x
value. And when it returns to where it started, that's X again. So the distance of one cycle is four times its maximum
displacement. So we should really say this is four * A since a represents the maximum displacement.
So this is a. Now what about the period and the frequency?
The period is the time it takes to complete one cycle. The period which is represented by
capital T is the number of it's the time divided by the number of cycles. So let's say if it takes 30 seconds
to complete 10 cycles, 30 / 10 is three. That means that it takes 3 seconds to complete a single
cycle. Therefore, the period is three. So that's how you can find the period. It's the total time divided by the total
number of cycles or the time it takes to complete one single cycle. The frequency is the number of cycles per second. So
if you take the total number of cycles and divide it by the total time, you can get the frequency.
So, for example, let's say if it takes, let me choose a nice number. Um, let's say if this system can cycle 200
times in 10 seconds. So, if it makes 200 cycles in 10 seconds,
that means that it's doing 20 cycles in 1 second. So, the frequency is 20 or 20 hertz. Hertz is the unit of
frequency. Now frequency and period are inversely related. The frequency is 1 / the period and the period is 1 / the
frequency. So let's work on some problems. What happens to the following if the maximum
displacement of the spring is doubled? So what happens to the total energy of the system? The total energy of the
system is the mechanical energy. Now the first thing we want to do is write an equation that relates the mechanical
energy with the maximum displacement and that's this equation. Me is equal to 12 k a^ 2 where a is the maximum
displacement. So if we double the value of a what happens to me for these types of
problems anything that's constant or remains the same replace it with a one. So 12 k we're just going to replace it
with one and plug in the value of a. If you double the value of a because the function is squared, the mechanical
energy will increase by a factor of four. If we were to triple the value of a, the mechanical energy will increase
by 3^ 2, which is 9. If we quadruple the value of a, the mechanical energy will increase by a factor of 16.
Now, what about part B? The maximum velocity. What equation can we write that relates maximum velocity to the
maximum displacement? Now we came up with the equation earlier. We said that the maximum velocity
is equal to the square root of k / m where k is the spring constant times the maximum
displacement. So notice that it's raised to the first power. So if we double the value of a
and this is going to stay the same. So we're going to replace it with one. The velocity will increase by a factor of
two. If you triple the displacement, the velocity will increase by a factor of three. If you cut the displacement in
half, the velocity will decrease by a factor of two or it's going to be 1/2 of its original value. Now what about part
C? The maximum acceleration. The equation that we wrote for that is this equation. The maximum acceleration is
equal to K / M times the maximum displacement. So if you double the value of the maximum displacement, the
acceleration will increase by a factor of two. If you triple it, the acceleration will triple. If you reduce
it by 1/2, the acceleration will reduce by a factor of two. Let's work on this problem. A massless
spring is pulled by 30 cm from its natural length and then released. The spring is attached to a4 kg block and
oscillates across a horizontal friction with surface. Let's begin by calculating the maximum
velocity. So if you want to you can draw a picture.
So here's the block and it rests across a horizontal surface and let's say this is the equilibrium position.
So right now it's pulled by 30 cm which is.3 m. So let's make a list of what we know. A
the maximum displacement is.3 and K the spring constant is 300 newtons per meter.
What equation do we need to calculate the maximum velocity? The maximum velocity is simply
the square root of K / M * A. The mass is4 kg. So we have everything we need to find the maximum velocity.
So this is going to be<unk> 300 /4 *.3 300 /4
is 750. The square root of 750 is 27.386 *.3
and you should get a maximum velocity of 8.216 216 m/s.
So now what about part B? What's the maximum acceleration? So let's use this equation. It's equal
to K * A / M. So it's going to be 300 *.3 / 04.3
/4 is basically 75 * 300 that's 225. So the maximum acceleration is 225 m/s squared.
Now what about part C? How can we find the velocity at a position of 20 cm from its natural
length? So, keep in mind the maximum velocity was about 8.2 something
8.216. We can use this equation. The velocity as a function of x is equal
to the maximum velocity times the square root 1 - x^ 2 / a^ 2.
That's the equation that we had earlier uh in this video. So we want to find the velocity at a position of 20 cm from its
natural length. Now, because we have a ratio between x and a, it doesn't really matter if you
use centimeters or meters. The units simply have to match because they're both going to cancel. Centimeters over
centimeters and meters over meters will cancel. So, we can plug in 20 cm if we want to.
So, the maximum velocity is 8.216. And then this is going to be 1 - 20^ 2 / 30^ 2
/ 30^ 2 is about 4 over 9 which is4 repeating and 1 minus that number is about.5 repeating and the square root of
that is 7454* 8.216. So, you should get a velocity of about
let's make some space. 6.124. So, your answer should be less than the
maximum velocity. If for some reason it's larger, you know it's not correct. Now, what about the next part? How can
we find the restoring force 20 cm from its natural length? Now let's say 20 cm is located at this
point. We know the restoring force is directed towards the left which means that it should be negative.
So the restoring force is equal to * kx. So this is going to be negative 300 newtons per meter
time x which is 2 m. Now in this case we need to convert centimeters to meters because we're using k and k is in
meters. 3 * 2 is 6. So 300 *2 must be 60. So the restoring force is 60 newtons.
It's negative because it's directed towards the left. Now, what about the acceleration?
Well, we know that the force is equal to mass time acceleration. So, the acceleration is the restoring force / m.
And the restor is -60 newton. The mass is4 kg. So -60 /4
is -150 m/s squared. Keep in mind the maximum acceleration was 225 and this is less than 225. So that works out.
Now you can also use this equation. Acceleration is equal to K / M * X.
It's similar to this equation. The maximum acceleration is K * A / M. But here it's K * X / M. So K is 300, X is20
and M is4. So if you use this equation, you should get the same answer
which is 150. Now we know it should be 150 because the resultant I mean the
restoring force is towards the left acceleration and the force that causes that
acceleration are usually in the same direction. So because the restoring force is negative the acceleration is
negative which really means that this equation should have a negative sign. So let's go ahead and add it.
So that is it for this problem. In this problem, we have a vertical spring.
So let's say this is the spring without a mass attached to it. Now once we add a mass to it, it's going to
stretch. Now it stretches by 4 m.
So this is the new equilibrium position of the mass. Now if we stretch it even further
by an additional 20 m from its new uh equilibrium position.
Once we release it, it's going to bounce up and down. So with this information
determine the spring constant, the amplitude and everything else. So let's focus on the spring constant.
We can use this picture to find the value of the spring constant. The applied force that stretches the
spring from its original position is basically the weight force of the object which is mg.
The spring wants to go back to its original length. So the restor
is equal to the weight force so that the net force is zero creating that new equilibrium position.
So f_sub_r is equal to mg and the restoring force is kx and g is 9.8. So you really don't need
to worry about the negative sign. They will cancel. Now let's solve for k. So k is going to be equal to mg / x. So the
mass is 2 kg. G is 9.8. 8 and it stretches by a distance of4 m. So 2 * 9.8 is 19.6 /4
is 49. So K is 49 newtons per meter.
Now what about part B? What is the amplitude in this problem? What do you think the amplitude is equal
to? Now remember this is the new equilibrium position and it's stretched 20 m from
that equilibrium position. So therefore the amplitude is 20. So once we release it from this position
it's going to bounce up and down 20 from this position. So it's going to go up 20 and down 20 m.
Now what about C? How can we calculate the maximum acceleration? What is the equation that we need? If
you recall the maximum acceleration is equal to the spring constant time the amplitude divided by the mass. So it's
49 *2 / the mass of 2. So the maximum acceleration is 4.9 m/s
squared. Now what about d the maximum velocity? The equation that we need for that
is the square root of k / m * a 49 / 2 is 24.5 and the square root of that
is about 4.95* *2 that's about.99
m/s. So now what about part E? What is the kinetic energy, potential energy and the
mechanical energy when it's 10 m from its equilibrium position? So let's find the
potential energy first. The potential energy is 12 kx^2 which is basically 12 * 49 times an x
value of10 49 *10^ 2 that's about49 * half that's 0.25.
So the potential energy is.245 Jew.
Now what about the kinetic energy? The kinetic energy is equal to 12 mv^2.
Now we can't use the maximum velocity. The velocity will be.99. It will be at its max when x is zero at the
equilibrium position. But we're not at the equilibrium position. X is 10. So we got to find the velocity first at 10.
The velocity as a function of X is the maximum velocity*<unk> of 1 - X^ 2 / A^ 2.
So the maximum velocity is about.99 and x is 0.1 a the amplitude is 2.1^ 2 /2^ 2 is 1/4 1 - 1/4 is 3/4s and the
square<unk> of 3/4s is about 866 times.99 you should get 8574
m/s. second. Now that we have the velocity, we can now use this equation to find the
kinetic energy. So let's plug it into that equation. So K is equal to 12 * the mass which is 2 kg
time the speed.8574 2. So half of 2 is 1 and 1 *85 74^ 2 is about 735 jew. So that's the
kinetic energy 735. Now let's calculate the mechanical
energy. We're going to do it two ways. So first let's use the equation
mechanical energy is equal to 12 K * the amplitude squared. So K is 49 and the amplitude
is 20 m or2 m2 is 1 over 25 or 04* 49 which is 1.96. Half of that is.98.
So the mechanical energy which represents the total energy of the system is.98 Jew. Another way in which
we could find it is by adding the potential energy and the kinetic energy. So if we add245 plus 735 it also gives
us the same answer of 98 uh jewels. So let's say if you didn't know the
equation to find the velocity at any point x, you can use this to get the mechanical energy. And if you subtract
the mechanical energy by the potential, that's one way you can get the kinetic energy.
So there's different ways of solving different things that you may need. So you're not faced with one option.
There's many options that you can use. Try this problem. A spring is compressed.35
m with a 0.25 kg block by an applied force of 500 newtons. What speed will the block have as soon
as it's released from the spring across a horizontal frictionless surface? So let's say this is the wall
and we have a compressed spring and the mass attached to it
and let's say this is the horizontal frictionless surface. Now it's compressed by an applied force
of 500 ntons and it's compressed by a distance let's say of.35
m and the mass of the block is 0.25. Right now the applied force is balanced
by a restoring force of 500 Ntons. So as soon as we release it the applied force will disappear and it's going to
accelerate towards the right due to this restoring force of 500. Now this restoring force is not
constant. As the spring expands, the restoring force will decrease eventually to zero.
At that point, the mass will be released from the spring and it's going to move to the right at constant speed. So, when
it's completely released from the spring, when it's no longer attached to the spring, what is the speed that the
block will have? How can we calculate that value? Take a minute and work on that example.
The first thing that we need to do is find the spring constant K. So F is equal to Kx. Therefore K is the
force / X. So we have an applied force of 500 newtons which compresses the spring by.35 m.
So if we divide these two, we'll see that the spring constant is about
14 29 rounded to the nearest whole number
newtons per meter. So now that we have the spring constant, we can use conservation of energy to calculate
how fast it's going to move. So the mechanical energy is equal to the kinetic energy
or you can say the potential energy stored in the spring is equal to the kinetic.
The mechanical energy is 12 k a^2. If you use the potential energy equation, it's 12 kx^2. But in this case, x is
equal to a because it's stretched. I mean, it's compressed all the way. X is basically at its maximum displacement
when it's.35. So we'll use the symbol a though. 12 k a 2 is equal to 12 mv^ 2.
So if we multiply both sides by two, we can get rid of the 12. So K is 1429,
A is.35, M is.25, and we need to solve for V.35^
2* 1429. That's about 175. And if we divide that
by 0.25, we can see that V ^2 is equal to about 700.21.
And now if we take the square root of both sides, the velocity is about 26.5
m/s. So that's how fast it's going to be moving.
By the way, let's say if we wanted to find the kinetic energy of the object
as soon as it's released using this equation, it's 12 times the mass, which is 0.25
times the speed, which is really 26.46 squared. The kinetic energy of the object is
about 87.53 Jew. Now another equation that you can use to
get that answer is the work equation. So keep in mind as soon as we release it, there's a restoring force that's going
to accelerate towards the right. Work is equal to force times distance. However, we don't have a constant force.
We have a variable force. Now, let's assume that this force decreases constantly. Well, it actually
does. So, we don't really have to assume. The force will decrease at a constant
rate from its maximum value of 500 to zero. as the block is displaced by.35 m.
So basically the energy transferred by this force should be equal to the kinetic energy
which is 87.5. So how can we find the area of that triangle?
Well area is basically 12 base time height or 12 * the height which is 500. That's
basically the restoring force times the base which is the displacement of.35. Half of 500 is 250 and 250 *.35
gives you 87.5 Jew. So that's another way in which you can calculate the kinetic energy gained by
the block is by using the work equation. But if you're going to use the restoring force, you need to add a 1/2 to it
because the restoring force is not constant. Now there are some other topics that you
need to know and that is the equations for the period and the frequency as it is related to the mass and the spring
constant of a spring. Now we need to compare circular motion with the simple harmonic motion of a
spring. So let's draw a circle. Now
let's say if an object on a circle moves from let's say point A to point B
as it moves this way. If you can view the circle horizontally from this perspective
rather than viewing it from uh top to bottom. If you can just have like a side view,
all you will see is that this particle is moving in the negative x direction. You're only going to see the
displacement along the x-axis. Now, as it moves from, let's say, position B to position C,
if you take a side view of it, you're going to see it's still moving towards the left.
Now, as it moves from C to D, it's going to appear as if it it's moving towards the right, which it
is. And from D to A, it's moving this way. So if you can view
it from the side, circular motion would seem similar to the oscillation of a spring as it moves back and forth.
So knowing that we can say that the speed of the object around a circle is
basically the distance that it travels divided by the time. And the distance around a circle is the circumference
which is 2 pi r. The time it takes to make one revolution or one cycle is the period which is
represented by capital t. Now notice that the radius of the circle is basically the amplitude.
So we can replace r with a. Now we no longer need this picture. So now at this point let's multiply both
sides by t. So vt is equal to 2 pi a. And now let's divide both sides by v. So the period is 2 pi * the amplitude /
the velocity. And if you recall the maximum velocity we said was equal to
the square roo<unk> of k / m * a. So to solve for a, we can multiply both sides by the square root of m / k. So
that m will cancel on the right and k will cancel on the right as well. So v * the<unk> of m / k is equal to a. So now
let's replace this a with this expression. So the period t is 2<unk>i / v times v
max time<unk> m / k. So we can cancel v. So therefore the period
of a spring is 2<unk>i * the square<unk> of m / k. So now let's talk about this equation.
If we increase the mass of the spring, what's going to happen to the period? Will the time it takes to complete one
cycle, will it increase or decrease? Because the mass is in the numerator of the fraction, the period will increase
as well. So let's say if you double the mass of the spring, what effect will it have on
the period? So for these questions, plug in the value that is being changed. Everything else, plug in the one. So if
we double the mass, the period will increase by the roo<unk> of two. Now what if we quadruple the
mass? The period will increase by the square roo<unk> of 4 which is two. So if you
quadruple the mass, the period will double. If you increase the mass by a factor of
9, the period will triple in value. What if you reduce the mass by 1/2?
the square root of 12 which is 1 over <unk>2 that's <unk>2 over2. So the period will increase well
actually it's going to decrease by <unk>2 over2 that's about 707. So it's going to be 70% of its value
or you could say it's reduced by a factor of <unk>2 because you're dividing it by <unk>2.
So if you decrease the mass to half of its value, the period is going to be reduced by a factor of <unk>2.
It's going to be 70% of its original value or 70.7. Now what about the spring constant?
Let's say if we increase the value of K, what happens to the period? The period will decrease since K is on
the bottom. So if you double the value of K, the period will decrease
by the square root of two. It's going to be 70% or 70.7% of its original value. If you quadruple the value of K,
the period is going to be 1/2 of its original value. Now what if you reduce the spring
constant by 1/4? What effect will that have on the period? 1 / 1/4 is 4. So if you decrease
K to 1/4 its value, the period will double. Now let's think about what this means.
So we could see from the equation why the period will increase if we increase the mass. But
let's understand it conceptually. As you increase the mass of the block, it's going to have more inertia. So it's
going to be harder to move. As a result, it's going to have less acceleration. F is equal to ma.
If the force is constant, whenever you increase the mass, the acceleration will decrease.
So if it has a lower acceleration, it's going to move more slowly. And therefore, an object that moves slowly
takes a longer time to get to its destination. Therefore, as you increase the mass, the period increases. Since
the object is heavier, it's going to take a longer time to to move back and forth. And so that's why the period
increases. Now what about the second situation where if we increase the value of K the
period decreases. A large K value means that the spring requires a greater force to compress or
stretch it. So the spring is stiff. Because the spring is stiff, it doesn't really move very far.
It doesn't really it's not easily stretched or compressed. So it can vibrate faster
as a result because it can vibrate faster its period will be reduced.
So keep in mind K is FX. So a large K constant means that a greater force is required to stretch it
with the same distance. And if the force is greater, the acceleration will be greater as well. And a higher
acceleration means a fast moving object. It can quickly gain speed. And if the object is moving faster, then it's going
to take a longer time, I mean a shorter time actually, to oscillate back and forth. And so that's why as you increase
the value of K, it oscillates faster and the period is reduced. Now going back to this equation,
there's one more equation that you need and that is frequency. Frequency is 1 / period. So the frequency is going to be
1 / 2<unk>i *<unk> k / m. So this time if you increase the K value, if you increase the spring constant,
a greater force is required to stretch or compress the spring, which means that there's going to be a greater
acceleration, which means that it's oscillating faster. And because it's oscillating faster, the frequency will
increase. Now if you increase the mass, the object requires
a greater acceleration to move it back and forth. But if the force is constant, as you increase the mass, the
acceleration will be reduced. And so it's going to be moving slower, so to speak. So therefore, the frequency will
be reduced. Frequency and speed, they're related. An object that can oscillate back and forth
at a faster rate will have a higher frequency. And an object that oscillates at a
slower rate will have a low frequency. So as you increase the value of K, the speed of the oscillations will increase
and so the frequency will increase. If you increase the mass, heavy objects tend to move slower and so the frequency
will decrease. A spring attached to a.25 kg block is stretched horizontally across a
frictionless floor. 25 m by an applied force of 200 newtons. Calculate the frequency and period of
the oscillations of this mass spring system. So let's begin by drawing a picture.
So here we have a spring attached to a mass and here is the floor.
So as we stretch it with an applied force once we release it the spring will
oscillate back and forth. So how can we find the frequency of the oscillations? Well we can use this
equation 1 / 2<unk>i * the square root of k / m. Now in this problem we don't have the
spring constant K. So we need to find it. But we do have the applied force and the distance that it's stretched by. So
K is equal to the force / X. So that's 200 newtons /.25 m. So let's go ahead and divide those
two numbers. So K is 800 newtons per meter. Now that we have the spring constant, we
can calculate the frequency. So it's 1 / 2 pi * the<unk> of k which is 800 / the mass which is 0.25 kg.
800 / 0.25 is 3200. And the square root of 3200 is about 56.57. And let's divide that by 2 pi.
and you should get a frequency of 9 hertz. Now that we have the frequency, we can
easily calculate the period. The period is simply 1 / f, which is basically 1 / 9.
1 / 9 is about 0.1 repeating. So the period is about1 seconds. So it takes1
seconds to make a full cycle. That is it takes 111 seconds for the block to travel towards the left and back to its
original position. And in 1 second the spring will oscillate nine times.
That's the frequency, the number of cycles that occurs in 1 second. So in 1 second it's going to go backwards and
forwards nine times in that single second. Here's another problem you can try. When
a 70 kg person gets on a 1200 kg car, the springs compress by 2 cm, what will be the frequency of vibration
when the car hits a bump? So, first let's find K. So, F is equal to Kx.
The force that compresses the spring by 2 centimeters is the weight of the person because once he gets on the car,
X changes by 2 cm. So we only need to use the weight of that person and not the weight of the car and a person to
find K. So K is equal to mg / X. So it's the mass of the person times 9.8 8 /
2 cm converted to meters. To convert centimeters to meters, divide by 100. So this is 02 m.
So it's 70 * 9.8 / that number. And the spring constant is 34,300 newtons per meter. Now that we have the
spring constant, we can calculate the frequency of vibration. Now when the car hits a bump,
you have to consider the mass of the person and the car because the spring is attached to both or it's affected by the
mass of the person and the car. It has to support the weight of both. So using the equation f is equal to 1 /
2 pi * the<unk> of k / m. This is 1 over 2 pi time<unk> 34,300
divided by the total mass. That's uh 70 + 1 1200 or 1270. 34,300
/ 1270 is about 27. And the square root of 27 is about 5.2.
And if you divide that by 2 pi, you should get a frequency of83 hertz.
So that's it for this particular problem. So here's another problem. Here we have
an insect caught in a spiderweb. We have the mass of the insect and the frequency and we need to find the spring constant
K. So let's start with the equation f is equal to 1 / 2<unk>i
*<unk> of k / m. Now let's solve for k.
So first let's multiply both sides by 2 pi. So 2 pi f is equal to the square root of
k / m. Now at this point we're going to square both sides so we can get rid of the
square root on the right. So 2 p^2 is equal to k / m. Now the last thing we need to do is multiply both sides by m.
So now we have the equation that we need. So the spring constant K is equal to the
mass * 2 pi F squar and let's assume that the mass of the spiderweb is negligible.
So we're only concerned with the mass of the insect. Now we need to plug in the mass in
kilograms. To convert grams to kilograms you can divide by a th00and or instead of writing 0.25g you can write 0.25. 25
* 10 - 3 kg. 1 g is about 0.1 kg or 1 * 10 - 3 kg. And the frequency is 20 hertz.
2 pi * 20 is about 40 pi or 125.66. If you square it, you should get 15791. And then if you multiply by 0.25 * 10us
3, this should give you a spring constant of 3.95
newtons per meter. Now that we have the spring constant K, how can we answer the second part of the
problem? So if the mass is now 10 g, what is the frequency? So
using the equation 1 / 2<unk>i *<unk> k m, it's going to be different.
So k is about 3 9478. 3.95 is the right answer. And the mass
is going to be.1 * 10us 3 kg. So 3.9478 /.1 * 10us 3 that's 39,478.
If you take the square root of that you should get 198.69 and then divide that by 2 pi
and this will be equal to 31.6 hertz. Now you can get the same answer even if
you don't have the value of k. And let me show you. So let's say if we had a ratio f_sub_2 /
f_sub_1. f_sub_2 is 1 / 2<unk>i square<unk> k / m2.
And we're assuming that k is the same since we're dealing with the same spider web. And this is going to be the same
thing but m1. So we can cancel the 2 pi and we can cancel k. So we get the equation f_sub_2 / f_sub_1
is equal to the<unk> of 1 / m2 / the<unk> of 1 / m1. So how can we simplify
the expression that we have on the right? What would you do to simplify it? Let's multiply the top and the bottom by
the square root of m1. If we do that, m1 will cancel on the bottom. And so we're going to have f_sub_2 /
f_sub_1. And if you multiply 1 over m2 * m1, this is just going to be the square root of
m1 over m2. So this is the equation that we can use to get the answer to the second part of
the problem if we don't have the spring constant k. So notice that a frequency of 20 hertz
corresponds to a mass of 25 g. Because we have a ratio of the masses, we don't need to convert it to kilogram.
So m1 is going to be 0.25 g. Now we're looking for the frequency f_sub_2 when the mass is10.25
/10 is 2.5. And the square root of 2.5 is about 1.581.
So f_sub_2 / 20 is equal to 1.581. To solve for f_sub_2, multiply both sides by 20. So 1.581 * 20
is 31.62 hertz, which is about the answer that we got a few minutes ago.
A block of mass attached to a spring with a constant of 200 newtons per meter vibrates at 15 hertz. What is the
frequency of vibration if the same block is attached to a spring of 500 newtons per meter? So the mass is constant here.
The only thing that changes is the spring constant and f. So we know that f is equal to 1 /
2<unk>i *<unk> of k / m. So we can write a ratio f2 /
f_sub_1 is 1 / 2 pi square<unk> k2 m. So we we're going to write the subscript for k since k changes. But m is
constant. So we don't need to write the subscript for m. So we can cancel the 2 pi and the mass. So we're going to get
this equation f_sub_2 / f_sub_1 is equal to the square t of k2 / k1. So as you increase the spring constant
the force will increase. So I mean not the force but the frequency will increase. So the
frequency should be higher than 15 htz. So f_sub_1 is 15 and that corresponds to a k constant of 200. K2 is 500 and we're
looking for f_sub_2. So if we divide 500 by 200, that's 2.5. And the square root of 2.5 is 1.581.
So f_sub_2 / 15 is that number. So to find f2, we need to multiply 1.581 by 15 and you should get a frequency of 23.7
hertz. A block under goes SHM with amplitude point4. That's simple harmonic motion.
If you see sho that's a simple harmonic oscillator. What is the total distance that it
travels in eight periods? Now keep this in mind the distance that it travels in one
period or one cycle is four times the amplitude. Let's say this is the equilibrium position.
This is the amplitude, the amount that it's fully stretched by. So
for to for this block to travel one complete cycle, it has to travel a towards the equilibrium position and
another distance of A and then back towards the equilibrium position and back towards where it started. So as you
can see the distance that it travels in one cycle or one period is 4 * a. So 4 *4
is 1.6 m. So in one period it's going to travel a distance of 1.6 m. In 8 periods it's going to be 1.6 * 8
which is about 12.8 m. So that's the total distance that the block will travel in a periods.
Now there's some other functions that can describe the motion of a mass spring system.
So let's say if we have a vertical spring and currently it's compressed and let's
say this is the equilibrium position. So it's capable of bouncing up and down. So therefore this is going to be equal
to the amplitude and this will be a Now as it bounced up and down, if you
plot this on a graph, let's say time is the x- axis
and the displacement is on the y- axis. So this is going to be the maximum displacement and here's negative a.
So according to this graph, it's starting at its compressed position. So that's at the top. If you graph it over
time, it's going to form a sinosoidal function. It's basically a sine wave. Now, because
it started at the top, this is the cosine function. If it started at the middle, it would be s.
Now if we draw the circle that we had earlier in this video, this is x and the radius of the circle
is a on the inside. This is the angle theta and this is the right triangle.
According to uh circa, if you've taken trigonometry at this point, you know that coine
of the angle theta is equal to the adjacent side / the hypotenuse. That's the cup part in SOA.
The adjacent side is the side that's very close to the angle. So that's X. The hypotenuse is across the box. That's
a. So cosine theta is X / A. So if you multiply both sides by A, you can get the value of X.
So therefore x is equal to a cossine theta. Now we know that linear displacement is
equal to velocity multiplied by time d= vt. Angular displacement is equal to omega
which is angular velocity multiplied by time. Now perhaps you have seen this equation
as you've studied rotational kinematics. If you haven't, you can look up my video that I've created on YouTube. You can
check that out and you'll see that equation. Omega, which is the angular velocity,
it's equal to 2<unk>i * the frequency. So therefore, we could say x is equal to a cosine
omega * t since theta equals omega * t. And then we can replace omega with 2 pi f. So x the
position function with respect to time is equal to the amplitude time cosine 2 pi f * t. So make sure that you write
this equation down. This is an equation that you need to know.
Now if you taken calculus you know that the derivative of the position function x gives you the instantaneous velocity.
So let's find the derivative. The derivative of cosine is equal to negative sign.
Now you have to keep the angle the same the 2 pi ft and then you have to differentiate the nested function or the
inside part of s which is 2 pi ft. The derivative of 2 pi ft is simply 2 pi f. t is the variable that you're
differentiating with respect to. The derivative of 5x is 5. The derivative of 9x is 9. The derivative of 8t is 8. So
the derivative of 2 pi ft is 2 pi f. By the way, for those of you who haven't taken calculus and who want to
understand how to find the derivative of a function to understand this step, you can find my video on derivatives in
YouTube. You just got to search for it. You may have to type in like power rule, product rule, quotient rule, but you
only need the power rule for this function. And also, you need to know how to find the derivative of trigonometric
functions as well, which you can also find out on YouTube. So, now let's continue.
So we need to replace a few things at this point. Let's replace f. We know that the
frequency is 1 / 2<unk>i time the<unk> of k / m.
In addition, earlier in this video, we mentioned that the amplitude is equal to the maximum velocity
times the square roo<unk> of m / k. And this came from the equation vax is equal to<unk> km
* a. So let's replace a with this expression and let's replace f with that expression.
So the velocity as a function of time is going to be a which is vax time of m / k*
sin 2<unk> f_t * 2<unk>i * f which is 1 / 2 pi square<unk> k / m.
So we can cancel 2 pi, we can cancel k and we can cancel m. So now we have the velocity function
with respect to time. So here it is the instantaneous velocity is equal to
the maximum velocity. Let's put the negative in front. So negative vax time sin
2 pi ft and that's it. So make sure that you add this to the list of equations that you need to know.
Now instead of writing vmax some textbooks will use the symbol vo but it's the same
thing. It's the maximum velocity. Now let's find the acceleration. The acceleration is the derivative of
the velocity function. So vmax is a constant. We don't have to change that. The derivative of s is
cosine. And the derivative of 2 pi ft is 2 pi f. Now let's replace vmax with what we
wrote before. We set equal to<unk> k / m * a. And the frequency
as we mentioned before is 1 / 2<unk>i square<unk> k / m.
So we can cancel 2 pi. k * k is k^ 2 and m * m is m^2. This time they don't cancel. So we have k^2
m^2 a cosine 2 pi ft.
The square root of k^2 is simply k and the square root of m^ 2 is simply m. So the acceleration as a function of
time is k / m * a cosine 2 pi ft. Now if you recall F is equal to Kx and the force is basically mass time
acceleration and let's replace X with the amplitude A. So the maximum acceleration is K * the amplitude / M
which is exactly what we have here. So therefore we could say that the acceleration function with respect to
time is equal to the maximum acceleration. You can say a kn or simply just a max time cosine 2 pi f_t.
So t is the variable, f is a constant and the maximum acceleration is a constant. So here's the third equation
that you need. A 75 kg mass vibrates according to the equation x= 6 cosine 9.2t. 2 t x is in
meters, t is in seconds. So what is the amplitude? Now we have the position function with
respect to time and we know the equation is a * cosine 2 pi ft. So the amplitude is simply the number in
front of cosine. Therefore the amplitude is 6. That's the maximum displacement of the 75 kg mass. Now, what about part B,
the frequency? Notice that the 9.2, the number in front of T, is equal to 2 pi F. So, let's set
2 pi F equal to 9.2 and let's solve for F. To solve for F, divide both sides by 2 pi. So, F is 9.2
/ 2 pi. So, the frequency is about 1.464 464 hertz.
Now that we have the frequency, we could find the period which is 1 / the frequency or 1 / 1.464
which is about 68 3 seconds.
Now how can we find the spring constant? What equation would you use to find it? You can use this equation. The spring
constant is the mass time 2 pi f^ squ. We've established this equation earlier in the video.
So k is going to be the mass which is 75* 2<unk> * the frequency 1.464
squared. 2 pi * 1.464 is 9.198. And if you square that, you
should get about 84.61 * 75. So K is equal to 63.46
newtons per meter. So now the next thing we need to do is find the total energy which is really
the mechanical energy of the system and that's 12 * K * the amplitude squar. So 12 * 63.46
* 6^ 2. Half of 63.46 46 is about 31.73 and if you multiply that by6^ squ you
should get 11.42 Jew. So that is the total energy of the system.
Now what is the potential and the kinetic energy at 0.2 2 and 6. So let's say if this is the spring and
let's say this is its compressed position. Let's say this is the equilibrium position.
At equilibrium, we know that X is zero. When it's fully stretched or compressed, X is equal to A.
which is about 6. When x is zero, we know that the velocity is at its maximum, which means
kinetic energy it's at its maximum. So at x equals z, the kinetic energy is equal to the total energy, which is
11.42. And when x is zero, the potential energy is therefore equal to zero. So that's
the answer for the first part. So when x is zero, k equals me, that's 11.42 jewels and p is equal to zero.
Now what about the other extreme? When x is 6, when it's fully compressed or stretched,
the kinetic energy will be zero at this point. But the potential energy will not be zero. It's going to be 11.42
at a displacement of 6. So whenever it's fully stretched or compressed, it's not moving. The
velocity is zero and all of the energy is stored in the form of potential energy. But at the equilibrium position,
it's moving at its greatest speed. There's no restoring force at that point. So all of the energy is in the
form of kinetic energy and there's no potential energy. Now what about in the middle somewhere between 0 2 I mean
somewhere between 0 and 6 which is at 0 2 in the middle it's going to have kinetic and potential energy. So we need
to use the equations um to get that answer. Now there's two ways you can do this.
You can do it the fast way or the long way but it's good to understand both so you can fully uh get the sense of this
chapter. So let's do it the fast way first. Let's find the potential energy when it's 2 m from the equilibrium
position. So we can use the equation 12 kx^2. So that's 12 times the value of k which
I forgot what that is since I uh erased the board. But let me recalculate it. So K was uh 63.46.
So let me just write that here just in case I need that again. And X is 2. So therefore the potential energy
at this point is about 1.27 Jew. Now if you know the mechanical energy and the potential energy you can find
the kinetic. The kinetic energy is simply the difference between a mechanical energy
and a potential energy. So 11.42us 1.27 is about 10.15.
So that is the kinetic energy. That's how you can find it the fast way. Now let's use the long way to get the
kinetic energy. So before we can find the kinetic energy, we need to use this equation. We
got to find the velocity at 2. So it's vax * the<unk> of 1 - x^2 / a^ 2.
Now we got to find vmax first. So vax is equal to the<unk> of k / m * a. So that's going to be the square<unk> of
63.46 46 / the mass which is 75 times the amplitude which is 6 63.46 / 75 that's like 84.61.
If you take the square root of that you should get 9.2 * 6. So the maximum velocity
is 5.519. So now we could find a velocity at 2. So that's going to be 5.519
square<unk> 1 minus let's plug in the x value of 2. So2^ 2 / 6^ 22 /6^ 2 is basically 1 over 9 which is 0.1
repeating 1 minus that is8 repeating. take the square root and then that's 9428 multiplied by 5.519.
So V at this position is about 5.203. It's slightly less than the maximum
velocity. So now we can find the kinetic energy. It's 12 mv^ 2. So 12 times the mass
time the velocity squared 5.203 2 is about 27.07
* 75 *.5 and you should get 10.15 Jew. So you get the same answer. But as you
can see taking the difference between a mechanical energy and a potential energy was a lot easier. to make sure you know
how to find the kinetic energy using both techniques. A 0.55 kg block vibrates according to
the equation x is equal to 1.5 cosine 12.4t. Determine the equations of the velocity
and acceleration as a function of time. So let's write the generic equations. So we know the position function is a
cosine 2 pi ft. Now by the way you can describe the
position function in terms of sign as well. It all depends on where the block starts at t equals z. For this function
if you use in positive cosine the block has to start from the top if it's a vertical spring. If it's horizontal, it
has to start towards the right of the equilibrium position. If it's starting at the equilibrium
position, you need to use the sign function. Now the velocity function
we said it was negative vo which is vmax time sine
2 pi f_t. So notice for the velocity function we don't need to change the inside part of
the s and cosine function. So 2 pi ft is 12.4t. 14. So that's going to be the same for the velocity function. All we
need to find is the maximum velocity. So let's go ahead and do that. Now vax
is equal to the square roo<unk> of k / m * a. We know that the amplitude is the number in front of cosine, which is 1.5.
We know the mass. It's 0.55. The only thing that we're missing is the spring constant K which we can use this
equation 2 p^ 2 * the mass. So we got to find the frequency 12.4t is equal to 2 pi ft which means
that 2 pi f is 12.4. So therefore the frequency is 12.4 / 2 pi.
Well actually we really don't need to find a frequency. What we could do is simply replace 2 pi f with 12.4
since we have 2 pi f in the equation. So 2 pi f is going to be 12.4 and then we're going to square it and multiply by
0.55. So the spring constant is 84.568. So with that information
we can now find vmax. So that's going to be the square t of k which is 84.568
/ m which is 0.55 * the amplitude of 1.5. So 84.568
/ 55 that's 153.76 and the square root of that is 12.4 * 1.5.
Therefore the maximum velocity is 18.6 6 m/s. So the equation of the velocity as a
function of time it's negative 18.6 sign and this part is just 12.4. So sine
12.4t. Now let's find the acceleration function. So we got to find the maximum
acceleration first. And the maximum acceleration is equal to
K * A / M. So K is 84.568.
The amplitude is 1.5 and the mass is 0 55. Therefore, the maximum acceleration is
230.64. The equation for the acceleration as a function of time it's equal to the
negative maximum acceleration time cossine
2 pi ft. So that's going to be 230.64 64 cossine 12.4
t. So if you have the position function, it's not that difficult to write the
velocity function and the acceleration function. You need to know the generic equation. This part is going to stay the
same and you need to know the equations to find the maximum velocity and the maximum acceleration.
So now let's work on the next part. Let's find the velocity.5 m from its equilibrium position. So
using the equation that we have v of t is equal to -8.6 sin
12.4t. So we're looking for V of.5. So that's -8.6
sine 12.4 *.5 that's going to be 6.2. So make sure the calculator is in uh radian mode for this to work. Sine of
6.2 in radian mode is about.083. And if we multiply that by8.6 six. The velocity at this point it's 1.545
m/s. So now let's find the acceleration. So let's write the function first. It's
-230.64 cosine 12.4t.
So this is going to be cosine 6.2 Just like sin 6.2 cossine 6.2 is about.9965
multiplied by -230.64. The acceleration at this point is -229.84
m/s squared. Now that we have the acceleration, we can calculate the restoring force.
So the restoring force is simply going to be the mass times the acceleration. So the mass is 0.55 and the acceleration
-229.84. So the restoring force at this point is about -126.4
newtons. So that is it for this problem. A spring of force constant 300 newtons
per meter vibrates with an amplitude of 45 cm when a.35 kg mass hangs from it. What is the equation describing this
motion? If the mass passes through the equilibrium point with positive velocity at t=0.
So we have a vertical spring. We have a mass hanging from it. Now there's four points at which there's
four ways that the system can start. It can start above the equilibrium position
in which case it has no choice but to go downward. So at t equals z for this particular shape or this particular
situation it has negative velocity because it's going in the negative y direction.
So therefore to graph it it is starting at the top with an amplitude of positive a.
So this would be the cosine graph positive cosine to be exact. So x would be equal to positive
a cosine 2 pi ft. But we don't have that situation.
This is if it's starting above the equilibrium point and if it's going down with negative velocity at t equals z.
The situation that we have for part A is that it's starting at the equilibrium position
and it's moving with positive velocity. That means it's going this way in the positive y direction. So to graph
it, because it's at the equilibrium point, it starts at the center and it's going in a positive y direction. So it's
going to go up. This graph is positive sign. So the position function is going to equal
positive a sin 2 pi ft. So that's what we have for part a. But
let's say if part A was different. Let's say if everything was the same. The mass passes through the equilibrium point but
with negative velocity meaning that it's going in a downward direction. I'm going to graph it in blue. So in that case it
starts at the equilibrium position that is the origin but it's going down and then up. So the ne the blue sign wave
would represent this function. Instead of being positive sign, it's going to be negative a sin 2 pi ft. If it was going
in the negative y direction. So anytime it starts at the equilibrium position, use the sign function. If it
goes up, use positive sign. If it's going down from the equilibrium point, use negative sign. So let's get back to
the the stuff that we're trying to figure out which is positive a sin 2 pi ft.
So we have the amplitude it's 45 cm which is45 m. Now what we need to figure out is 2 pi
f. We know that k is equal to 2<unk> f^ 2 * m.
So k / m is 2 pi f^2. So 2 pi f is the square root of k m. K is 300. The mass is.35.
300 /.35 is 857.1. If you take the square root of that, you
should get 29.28 or 29.3. Therefore the position function is going
to be a which is uh 045 time sin 2 pi f which is 29.28
* t and this is positive.45. Now what about the second part of the
question? What if the mass starts at the lowest point below the equilibrium point?
So let's say this is the equilibrium point. If it starts below it, it has no choice but to go up. It can't go down if
it's at the lowest point. So it has to be moving up with positive velocity. So if we graph it,
we're starting at a. So if you don't start at the center, it's going to be the cosine function. S always starts at
the center. Since we're starting at the bottom, this is negative cosine. So x is a cosine 2 pi ft. So the equation that
describes this motion is.45 cosine 29.28 * t. So that's the answer for part B.
So let's review. There's four functions that you need to know.
So it can start at the equilibrium position and go up with positive velocity or it can go down with negative
velocity starting from the equilibrium position or it could start from the top or it could start from the bottom.
Anytime it starts from the center, you have the positive sign function. If it's going up, if it starts from the
center and goes down, it's negative sign. If it starts at the top, it's positive
cosine. If it starts at the bottom, negative cosine. And remember, the origin represents the equilibrium
position. Now, let's talk about damp harmonic motion. This form of motion occurs when
friction is present. But let's draw two graphs. When friction is not present and when it is present.
So let's say this is positive a and negative a. And let's say the graph starts at the
top. The mass is pulled to the right and then released from rest. So there's no friction
the amplitude will be constant. The energy in the system remains the same. Notice that the amplitude is not
decreasing. That is the maximum amplitude or the maximum displacement.
Now what if friction is present? How will that change the appearance of the graph?
So if friction is present, it's going to lose energy and so the amplitude is going to
decrease over time until eventually it reaches zero. In this case, dampen has occurred.
So dampen is caused by friction. It could be internal friction or friction due to air molecules,
but it reduces the energy of the system and this is seen by a decrease in amplitude over time.
Now, there's three different types of dampen that you need to be familiar with.
There's overdampen, under dampen, and critical dampen. When the system is under damp,
the object will make a few swings before it comes to rest.
So, it's going to make a few cycles and eventually it's going to become zero. Now, if it's over damp,
it won't get the chance to make multiple cycles. Within its first cycle, it's going to
lose all of its energy and go to zero, but it's going to take a long time for it to do that. And then
there's critical dampen where it reaches zero faster and it doesn't make multiple cycles.
Critical dampening is useful for the shock absorbers in a car. You don't want your car bouncing up and down every time
it hits a bump. You want it to absorb that energy fast. And so you want critical dampening in a situation where
you have an underdamp uh system. Let's say like a a door that's old. It can bounce back and forth before it
closes. And you don't want that. So whenever you want to reduce bouncing in a device, you want critical
dampening. You want to remove the energy as quickly as possible from the system.
Now there's one other topic that we need to discuss and that is resonant frequency.
When you apply a force to an oscillator, you can cause forced vibrations to occur and as you force the oscillator to move,
you can increase the amplitude. However, if you apply the force at the natural frequency of the object, it's going to
be most effective when increasing the amplitude. So if the applied frequency
matches the natural frequency or if it's very close to it, the amplitude
can increase greatly. When the applied frequency matches the natural frequency, it's known as the
resonant frequency. A good example to illustrate this is a swing. Imagine if you have a child on a
swing and to increase the amplitude of the swing,
you need to push the child at the right position and that is while the child is swinging
back towards you. That's when you apply the push and at that point the child can go higher and higher. However, let's say
if you try to push the child at the middle at the equilibrium position, you probably will not get the greatest
effects and increase in the amplitude. You want to apply the force at a rate that's equal to the natural
frequency. If you do that, then the applied force is at the resonant frequency and that's when you can
achieve maximum amplitude. That's when you can increase the amplitude of the oscillator most effectively.
So just make sure that you keep this fact in mind. Whenever the applied force matches the natural frequency of the
system that is the resonant frequency, the applied force will be most effective in increasing the amplitude of the
oscillator.
Periodic motion refers to repetitive oscillations around an equilibrium position. In a mass-spring system, this motion occurs as the mass moves back and forth, stretching and compressing the spring, repeatedly returning to the starting position over equal time intervals.
Hooke's Law states that the restoring force (F_r) exerted by the spring is proportional to the displacement (x) from equilibrium and acts in the opposite direction: (F_r = -kx), where (k) is the spring constant. This means the farther you stretch or compress the spring, the stronger the force pulling it back.
The period (T) is the time for one full oscillation and is given by (T = 2\pi \sqrt{m/k}), with (m) being the mass and (k) the spring constant. The frequency (f), which is the number of cycles per second, is the reciprocal of the period: (f = 1/T = (1/2\pi) \sqrt{k/m}).
During oscillations, potential energy (U = \frac{1}{2}kx^2) is highest at maximum displacement when the spring is stretched or compressed, while kinetic energy (K = \frac{1}{2}mv^2) is highest as the mass passes through equilibrium with maximum velocity. The total mechanical energy remains constant (if no damping), continuously converting between potential and kinetic forms.
Damping, caused by forces like friction, reduces the amplitude of oscillations over time. Depending on its strength, it can result in underdamped (gradual amplitude decrease), overdamped (slow return to equilibrium without oscillating), or critically damped motion (fastest return without oscillations).
Resonance occurs when an external periodic force matches the system's natural frequency, causing oscillations to amplify significantly. For example, pushing a swing in sync with its natural frequency makes it go higher. Understanding resonance is crucial to avoid structural damage due to excessive oscillations in engineering designs.
The maximum velocity is (v_{max} = A \sqrt{k/m}), where (A) is amplitude, (k) is spring constant, and (m) the mass. The maximum acceleration is (a_{max} = (k/m) A). These formulas help predict the fastest movement and greatest change in speed during oscillation.
Heads up!
This summary and transcript were automatically generated using AI with the Free YouTube Transcript Summary Tool by LunaNotes.
Generate a summary for freeRelated Summaries
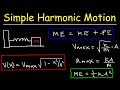
Solving Simple Harmonic Motion: Energy and Spring Calculations Explained
This video tutorial breaks down a simple harmonic motion problem involving a spring-block system. Learn step-by-step how to calculate the spring constant, amplitude, maximum acceleration, mechanical energy, maximum velocity, and velocity at specific displacements with clear formulas and examples.

Comprehensive Overview of Oscillation in Edexcel IAL Unit 5
This lesson provides an in-depth exploration of oscillation, focusing on key concepts such as equilibrium position, time period, frequency, and types of oscillation. It includes practical examples, definitions, and the relationship between oscillation and energy transfer, as well as the effects of damping and resonance.
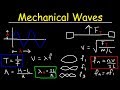
Mechanical Waves Explained: Amplitude, Frequency, Wavelength, and Harmonics
This video tutorial provides step-by-step solutions to fundamental mechanical wave problems, including calculating amplitude, wavelength, frequency, period, and wave speed. It also explains harmonic frequencies on a string, providing formulas and examples to understand wave behavior in physical systems.
Understanding Motion: A Comprehensive Guide
Dive deep into the concepts of motion, speed, and velocity, along with practical examples and clear explanations!

Complete Guide to Motion: Distance, Velocity, Acceleration & Projectile Physics
Explore fundamental physics concepts including distance vs. displacement, speed vs. velocity, acceleration, and motion graphs. Learn to solve typical exam questions on free fall and projectile motion with clear explanations and practical examples.
Most Viewed Summaries

A Comprehensive Guide to Using Stable Diffusion Forge UI
Explore the Stable Diffusion Forge UI, customizable settings, models, and more to enhance your image generation experience.

Kolonyalismo at Imperyalismo: Ang Kasaysayan ng Pagsakop sa Pilipinas
Tuklasin ang kasaysayan ng kolonyalismo at imperyalismo sa Pilipinas sa pamamagitan ni Ferdinand Magellan.

Mastering Inpainting with Stable Diffusion: Fix Mistakes and Enhance Your Images
Learn to fix mistakes and enhance images with Stable Diffusion's inpainting features effectively.

Pamamaraan at Patakarang Kolonyal ng mga Espanyol sa Pilipinas
Tuklasin ang mga pamamaraan at patakaran ng mga Espanyol sa Pilipinas, at ang epekto nito sa mga Pilipino.

How to Install and Configure Forge: A New Stable Diffusion Web UI
Learn to install and configure the new Forge web UI for Stable Diffusion, with tips on models and settings.

If you found this summary useful, consider buying us a coffee. It would help us a lot!