Comprehensive Overview of Oscillation in Edexcel IAL Unit 5
Introduction to Oscillation
- Definition: Oscillation refers to repeated movement or motion. Examples include a pendulum, a mass on a spring, and a test tube in water.
Key Concepts
1. Equilibrium Position
- The point where the resultant force on an oscillating system is zero. It is the position where the system comes to rest when not oscillating.
2. Time Period (T)
- The time taken to complete one full oscillation. For example, in a pendulum, it is the time taken to swing from one extreme to the other and back.
3. Frequency (f)
- The number of oscillations completed in one second, measured in Hertz (Hz). The relationship between frequency and time period is given by:
f = 1/T or T = 1/f.
4. Displacement
- The distance from the equilibrium position, measured as a vector quantity.
5. Amplitude (A)
- The maximum displacement from the equilibrium position during oscillation.
Simple Harmonic Motion (SHM)
- Conditions for SHM include:
- Acceleration is directly proportional to displacement and directed towards the equilibrium position.
Energy Transfer in Oscillation
- Energy changes occur between kinetic energy and potential energy during oscillation. For example, in a pendulum, gravitational potential energy is converted to kinetic energy and vice versa.
Damping and Resonance
1. Damping
- Damping refers to the reduction of amplitude over time due to energy loss, often caused by friction or air resistance. Types of damping include:
- Under Damping: Oscillation continues but with decreasing amplitude.
- Critical Damping: The system returns to equilibrium without oscillating.
- Over Damping: The system returns to equilibrium slowly without oscillating.
2. Resonance
- Occurs when the frequency of an external force matches the natural frequency of the system, resulting in increased amplitude of oscillation.
Practical Applications
- Examples include the use of dampers in buildings to reduce oscillation during earthquakes and tuned mass dampers in bridges to minimize vibrations.
Conclusion
- Understanding oscillation is crucial in various fields, including engineering, physics, and everyday applications. This lesson covers the fundamental concepts and practical implications of oscillation as per the Edexcel IAL Unit 5 syllabus.
hi uh complete lesson uh on oscillation uh focused on Ed XL IAL unit 5 syllabus uh okay what is oscillation uh
oscillation means repeated movement or repeated motion is called oscillation uh there are examples many
examples we can uh tell for oscillation for example if you uh attach a small sphere to a
uh like a string and let it uh just push it to a small distance and leave it it will oscillate it will show oscillation
like that U even if you have a string attached to a mass the string will be at rest which is carrying a mass then pull
it through small distance and leave it then the spring will oscillate repeated movement it will show same way when a
spring attached in horizontal position to a trolley or something like that on a table and pull this uh trolley through a
small distance and leave it then it will oscillate not only that even a small object something like a test tube a
weighted test tube uh floating in water so it will be at rest push the test tube through small distance and leave it the
test tube which carries a small Mass inside that will perform oscillation so like that there are many different
examples we can show even bung jumber is a he also can perform uh oscillation so like that there are many different
examples we can tell or show for oscillation that means oscillation means repeated movement is called oscillation
okay so there we use different technical words first thing you must know uh equilibrium position so the equilibrium
position means the position at which the resultant for you know any system that when it performs oscillation there will
be uh force acting on it not only one force there with different forces or more than one forces acting on it so the
position at which the resultant force acting on it becomes equal to zero is called the equilibrium
position or we can say the position to which it comes to rest when it is not oscillating is also the equilibrium
positions either way uh we can show but the better way of telling U what is equilibrium position means position at
which uh the resultant Force acting on the uh oscillating system uh becomes equal to zero is called uh equilibrium
position so when the system is not oscillating it will come to rest at the equilibrium position then you should
know what is oscillator oscillated means the system that performs or shows oscillation is called oscillat earlier I
drew different diagrams for example a spring which is carrying a mass or a spring in horizontal position which is
attached to a trolley or test tube which is floating in water each of them are different oscillators so oscillator
Means A system that performs oscillation is called oscillator okay so you know the meaning
of oscillator you know the meaning of uh equilibrium position the next thing is time period of the oscillation what do
you mean time period of the oscillation means the time taken to complete one full oscillation okay what is one full
oscillation for example I'll take an example like uh a simple pendulum we call a small Bob attached to a string
okay it is the equilibrium position because it will be at rest at this position when it is not oscillating okay
so then pull it and leave it to the left or right you can pull it to the right or left okay for example you pull it to the
right okay it has come to this position now so from this when you leave it it will move from here to here then it'll
come back to this one this is called the time taken for this oscillation is called one period or if I consider from
the equilibrium position from the equilib you consider the motion so here I consider the motion from the extreme
position extreme position means where it has gone to the maximum position that I we call Extreme position so from there
when I consider the time taken to move from this extreme position to The Other Extreme position then come back to the
same initial extreme position uh the time taken for that oscillation is called uh time period we call this as
one full oscillation same way uh if I consider from the equum position so the time taken to move from here to the one
side of the extreme position then from here to the other side of the extreme position then come back to the same
initial point that is the equum this is called one one full oscillation and the time taken for this oscillation uh is
the time period okay so you must know the meaning of time period also and you should be able to identify one full
oscillation uh even if it is like a spring attached to uh Charly on a horizontal table when you keep it like
this uh it will be at rest at this position so you uh you pull it to the right so from here you you pull it to
this side and you are leaving it it will move from here to this extreme position where the spring will be compressed then
it will move back to this position so the time taken for this oscillation is the time period and this oscillation is
called uh one period the time taken for that oscillation is called uh time period like that you must be able to uh
know the meaning of one full oscillation and the time taken to perform one full oscillation is called time period it can
be any unit uh the notation is capital T okay the next thing you should know is frequency of the oscillation frequency
of the oscillation means uh number of OS ation completed during 1 second normally we consider 1 second or you can say
during unit time but normally we consider 1 second so the number of oscillations completed per second is
called or is defined as frequency of the oscillation that need not to be a whole number it could be a it could be 2.3 or
something like that also it also correct we can say the frequency so frequency means number of oscillations completed
per second is defined as frequency so its unit is uh per second sorry base unit SI unit is Hertz and
also you know you learned that In Waves also the period and frequency the relationship
betweene period and frequency uh T = 1 F or f = 1 / T the same relationship we here also use to relate uh time period
uh and the frequency okay uh then displacement okay what is displacement during oscillation displacement it it's
always measured from the equilibrium position displacement is a vector quantity you learn that in all even in
year 10 even in unit one displacement is a vector quantity but here the displacement is measured from the
equilibrium person careful uh it's a very common mistake St they make uh when we consider the uh displacement
displacement is measured from the equilibrium position so if I consider oscillation something like this
okay consider this diagram a sphere is kept on a smooth horizontal surface and it's attached to a spring uh o is the
equilibrium position so equilibrium position means the position at which the resultant force is equal to zero so from
this position uh the spring is compressible right from this position the C is pulled to the right up to this
position uh name it P1 uh the uh the sphere is pulled up to here then release so we'll take this is the time tal 0 at
which the sphere is released okay the sphere will move towards the equilibrium position because the spring will pull it
back due to the tension the sphere will move towards the equilibrium position so initially when t equal Z what is the
displacement the displacement is measured from the equilibrium position it's measured from the equilibrium
position okay the displacement is measured always from the equilibrium position so later when the sphere comes
to this position it has come to this position so at time tal T1 the sphere has come to this position tal T1 so
what's the displacement at T1 we use the word at at T1 that is not earlier one say if we say
earlier it was S1 now at time t or if I say initially X not initially when t equal Z the displacement is X when it is
at P1 now it has come to the position P2 at time T = T1 at time tal T1 has come to the position Point P1 so what is the
displacement means it must be measured from the equilibrium position so it should be written this way that is X1
not this one we don't measure uh the displacement uh from P1 to P2 we measure always from the to because here we see
displacement at you can see that later when I start simple harmonic motion the equations are displacement at we don't
consider displacement during the time we don't consider displacement at an instant what is the displacement okay so
here the simple harmonic motion I haven't defined it I'm going to Define define means the conditions required to
have a simple harmonic motion but any whatever it is in your syllabus always not only your syus during this simple
harmonic motion we always consider the this displacement at an instant not the displacement during the in time period
so for example if I say initially this uh X not for example 10 cm when t equal Z later when this X1 for example 4
cm so what is the where the time taken T1 maybe I can name the time uh maybe 2 seconds okay so I can the displacement
initially when Tal 0 is 10 cm displacement at 2 seconds is 4 cm but if you ask a student who is doing unit one
what is the displacement 2 seconds don't say at or during he will say certainly initially the sphere was at P1 now it
has come to P2 then he will see the displacement is 6 cm towards left but actually here we will say the
displacement at 2 second at 2 2 second uh is 4 cm towards right it's moving towards left actually you can see the
motion is towards left when you release it from P1 is moving towards 4 but we say at 2 seconds the displacement is 4
cm towards right because we measure always the displacement from o we take it as a reference point O and uh we
consider the displacement at not the displacement during the time we don't consider okay this is the displacement
so this is little bit confusion but anyway uh that's the way the equations we are going to get later uh you would
have done it at school that equation also always gives the displacement at a particular instant okay that you must
know that okay so the next thing is uh amplitude amplitude means during the oscillation uh it must be when we C
simple harmonic motion the oscillation must be symmetrical on either side of the equilibrium position position that's
the way your you won't get any question where the the altitude varies or anything you won't get so we consider
the oscillation symmetrical on either side about the equilibrium position and the maximum displacement is called
amplitude so amplitude could be denoted by either capital A or X not either way we can use uh for amplitude uh sometimes
books they use capital A for amplitude uh some books they use x not for the amplitude Okay in your syllabus we use
capital a uh to indicate amplitude amplitude is the uh maximum displacement okay so the next thing is uh simple
harmonic motion what is the meaning of of what's the condition for simple harmonic motion all the oscillations
won't be simple harmonic uh to be a simple harmonic motion certain conditions must be satisfied what are
the conditions uh that must be satisfied if an oscillation bonds to be uh simple Harmony you must know that so the first
condition is uh the displac I already told that displacement is always measured from the equilibrium position
so it's a vector quantity if I take towards right positive towards left should be negative or if I take vertical
oscillation upward Direction positive then downward direction from the equilibrium position should be negative
uh always we measure from the equ position and displacement is a vector quantity it has direction right okay so
you know acceleration also uh a vector quantity so it also has Direction so the first condition if an oscillation wants
to be a simple harmonic motion the first condition the acceleration must be directly proportional to displacement so
it can't be a constant acceleration the acceleration is depending on displacement and it must be directly
proportional to the displacement the second condition the direction of the acceleration should be always point or
Point directed towards the equilibrium position so for example um imagine this is the equilibrium position uh particle
is oscillating the oscillation is due to the motion oscillation of a particle a particle is oscillating on either side
of p and Q so p and Q are the extreme position o is the equilibrium position a particle is oscillating on either side
so if the particle is here and if the particle whether it's moving towards o or moving towards Q we don't care
whatever the direction of motion the acceleration must be directed towards the equilibrium position ACC must be
directed towards the equilibrium position and we know that this placement is always measured from the equ position
so the displacement is measured from here x you know that X is going to be opposite to the direction of X is
opposite to the direction of a same way when the particle is on the left side uh left side of the equum position there
also whatever the direction the particle moves we don't care but the acceleration must be always always towards the
equilibrium position so if the acceleration is always towards the equum position the displacement is
always measured from the equilibrium position means here also you can see the direction of the displacement and the
direction of the acceleration are in opposite so whatever the direction of motion the particle oscillates or the
system oscillates we don't care the direction of the acceleration must be always directed towards the equilibrium
position and I already told that the displacement is always measured from the equilibrium position therefore always
the direction of the displacement and the direction of the acceleration will be opposite among them but the direction
of the acceleration and direction of the displacement opposite among them at the same time acceleration must be directly
proportional to the displacement so when two vectors are always opposite how do we denote we denote it with minus sign
so that's the reason we write this like a proportional to - x so the minus sign indicates the direction of acceleration
is always opposite to the direction of displacement or direction of displacement is always opposite to the
direction of acceleration okay so you know that if an oscillation wants to be simply harmonic
the oscillation should satisfy two conditions what are they the acceleration must be directly
proportional to displacement first condition the second condition the direction of the acceleration must be
always towards the equilibrium position so one by one we'll analyze uh certain examples and find out whether can it be
a simple harmonic uh Mo or can it perform a simple harmonic motion or can that oscillation be a simple harmonic
motion we'll analyze one by one the first one we'll imagine two Rams are kept like
this imagine two small ramps are kept as shown on the diagram they make the same angle so perfectly smooth no drag Force
no uh friction if you keep a small sphere something like a ball bearing and release it what will happen the
according to the law of conservation of energy there is no drag Force no loss of energy so the uh ball bearing will
accelerate downwards when it comes here it will have the maximum speed gaining kinetic energy loss in GP gaining
kinetic energy so it will move to to this side so when it move to this side it will come back to the same level
because both side it has the same angle the both ramps are making the same uh angle so the sphere will more the ball
bearing will downwards accelerate then decelerate then accelerate decelerate like that since there's no drag Force no
loss of energy it will oscillate forever okay so can this oscillation so it's an oscillation this is repeated movement
the ball bearing is going to move move repeatedly between this point and the same level we can imagine the point this
is P1 to P2 so if I C the same level somewhere here P2 is going to oscillate between P1 and P2 continuously okay can
this oscillation so this is the equilibrium position because uh when it is not oscillating it will come to rest
at this position so that is going to be the equilibrium position so I can name the lowest point of the two Rams where
they are touching each other that is going to be the equilibrium position of this oscillation okay can
this oscillation this we can say an oscillator the whole system can be taken as an oscillator can this oscillation be
a simple harmonic motion we'll analyze it okay so no friction if I think about the uh ball bearing it has mass it's
kept on a ramp at this position so the mass is M it makes an angle Theta with horizontal so the component of the
weight along the ramp down is mg sin Theta mg sin Theta so when I consider the equilibrium position this is equum
position I already explained why because when it is not oscillated will come to rest at this position so mg sin Theta is
pointing towards the equilibrium position mg sin Theta so if I use the Newton Second Law FAL M that is mg sin
Theta = to M so the acceleration is towards the equilibrium position which is um G sin Theta same way after it
passes the equilibrium position it's going to move to the left side until it reaches the point P2 there the velocity
is from o to P2 but the acceleration is due to the compound of the weight when the sphere is here the compound of the
weight here also will act towards the equilibrium position that is mg sin thet so there also the acceleration will be
towards the equilibrium position which is a isal to G sin Theta okay so the acceleration is whatever the direction
of motion the sphere or the ball bearing performs or in whatever the direction either left or right the acceleration of
the ball bearing is pointing towards the equilibrium position o but can the is be a simple harmonic
motion so here also the acceleration is always directed towards the equilibrium position but can it be a simple harmonic
motion because here the acceleration is directed towards the equilibrium position but when you consider the
acceleration the acceleration is constant here G is constant T is constant sin thet is Conant so here
acceleration is directed towards the equilibrium whatever the direction of motion the acceleration is always
pointed towards the equilibrium position but acceleration is not directly proportional to displacement it is a
constant the acceleration is a constant acceleration therefore it is not a simple harmonic motion it's an
oscillation yes where the acceleration is always directed towards the equ you know that to be a simple harmonic motion
two conditions should be satisfied first ACC must be directly proportional displacement the second condition the
acceleration must always Point towards the equili position this oscillation is satisfying the second Condition it's
pointing towards the equilibrium position but acceleration is not depending on displacement acceleration
is a constant here therefore this is not a simple harmonic motion okay so all the oscillations are not simple harmonic the
conditions must be satisfied I already told several times a proportional to X oxygen directly proportional to a
displacement that is not satisfied here but the second condition satisfied here therefore it won't be a simple harmonic
motion okay now I'll draw a few examples uh more examples and we'll check whether uh that type of oscillations can they
perform simple harmonic motion okay we'll consider this second example a spring which has spring
constant K and the spring is compressible you can compress the spring so that such spring is attached to a
trolley of mass m and kept on a frictionless horizontal surface so initially the trolley is at equili
position or you pull the trolley towards right through a small displacement and you release it so when the trolley is on
the right side I'll draw it here when the trolley is on the right side what are the forces acting on it so this is
the equilibrium position I'll draw a vertical line for the equum position so what are the forces acting on the
trolley the weight is acting downwards mg at the the normal reaction from the surface is acting up so Ral mg they
balance each other we don't need it okay the spring is extended so spring will exert a tension on the solid that is
towards left we know that we learned that tension is directly proportional to
extension according to Hook's law so T proportional to extension that we know that t is
equal to KX okay so the displacement is measured from the equilibrium position so the
displacement is measured from o towards right when the trolley is here when the trolle is moving to the left or right we
don't care but the that's nothing uh but it's not a matter but we measure the displacement from the equum position
that is towards right X the only force that performs the oscillation or motion is the unbalance Force unbalanced force
which is the tension because R and mg balance each other so the only one unbalanced force is there that is T so
the t is acting towards left you can see the T the tension which is unbalanced force acting towards left so according f
m when we consider the tension is towards left that is KX F = KX is = to M A so a = k m into X look at here K is a
constant m is a constant so K is a constant m is a constant so AAL a constant into X therefore a proportional
to X here the acceleration of the trolley depends on the displacement or the displacement is measured from the
equum position so actually X is both displacement as well as the extension both measured from the equum position no
so a proportional to displacement X here at the same time you can see that the direction of the displacement is
towards right the tension is towards left therefore always the direction of the tension or the direction of the
force that is the always force and acceleration are parall to each other resultant force and acceleration are
parall to each other according to Newton Second Law the direction of force the resultant force and the acceleration are
parall vectors so the resultant force is towards left means acceleration is always pointing towards the equum
position you can see that acceleration is always pointing towards the equilib position because tension is always
pointing towards the equ position when the trol is on the right side of O okay if the trol is on the left side of O the
spring will be compressed so when the spring is compressed I'll draw the trolley here when the spring is
compressed the compressive force will act on the trolley that will be towards right the compressive force that also
tension that is acting towards right so we know that t = to k x x is the displacement also that will be the uh
compression of the uh spring that is measured from the equilibrium position from o it's
measured towards left X that is the compression as well as that is the uh displacement also because only one
spring is attached to the solid so the compression or the displacement is towards left the tension which is
unbalance force is acting towards right so here also the direction of the unbalanced force is opposite to the
direction of uh displacement means direction of acceleration is opposite to the
direction of uh displacement also the tension is pointing towards the equum position therefore acceleration also
will Point towards the equilibrium position when the trol is on the left side of the equium position so here tal
k x same way I can derive here also f m so in of T that is KX = m a a = k MX when it's on the left side K and M are
constants so the whole thing is constant so a proportional to X also a is pointing towards the equilibrium
position because tension is pointing towards a% so this will perform simple harmonic motion so when you attach a
trolley or sphere or whatever any Mass to a spring and when the mass is kept on a smooth surface and when you let it
oscillate that oscillation will be single harmonic okay so we'll consider this
type of oscillation a spring is attached to a trolley and the trolley is kept on a smooth ramp that makes an angle Theta
with horizontal uh and this is the position we call equ position the trolley at rest
when the trolley is at rest already the spring is extended because you know the the compound of the weight of the
trolley along the slope down is mg sin Theta to balance that downward compound of the weight there will be a tension
upwards acting on the trolley so that tension will balance the weight of the trolley along the slope downward so when
the trolley is at equilibrium position o that when I draw the free body force diagram separately something like
this so the weight will act vertically down mg that we don't need the compound of the weight along the slope down is mg
s Theta that is balanced by a tension and that is T we can see the extension of the spring due to uh this uh force of
mg sin Theta is X1 so T is equal to K X1 where K is the spring constant of the spring so we can say
kx1 is equal to mg because it's at o where the resultant force acting on the trol is zero there a normal reaction we
don't need we don't need the normal reaction we don't consider that in this uh oscillation so R is balanced by mg
cos Theta what you learned in unit one so here kx1 is equal to mg then what we do from this position we pull the
trolley through a small distance you know o is St position so you are pulling it down through X I'm not drawing the TR
again so but you are pulling it toward right through X and you leave it so trolle is going to oscillate between
this point you can call P1 that point has P1 and P2 between P1 and P2 the trolley is going to oscillate the spring
is compressible you can compress the spring a lot we'll take that way uh the turns of the spring won't hit each other
and stop the oscillation the compressible spring so the spring is going to the trol is going to oscillate
on either side of O up to P1 and P2 so when the trol is somewhere on the right side at a displacement X or from o that
time the extension of the spring is uh X1 + x so when we consider that situation I draw the diagram again when
the trolley is at a position uh before P1 somewhere when it has a displacement towards right X from the equum position
the extension of the string is going to be uh x + X1 already it has extension X1 when it is at 4 now the extension is
going to be x + X1 so the tension will act on the trolley along the slope up that is K into x + X1 the compound of
the weight will be along the slope down mg sin Theta okay so we know that KX + X1 is
greater than mg sin earlier K X1 balanced mg sin Theta sorry mg sin Theta earlier kx1 balanced mg G sin Theta so
here k x + X1 so this is larger than X1 so the resultant force acting on the TR will be along the slope of the resultant
force is going to be k x + X1 - mg sin Theta this is the resultant force acting on it towards the
equilibrium position no so when I solve it's going to be KX + kx1 - mg sin th but I know that kx1 is mg sin Theta kx1
is mg sin Theta you can see that this kx1 is equal to I got it first equation kx1 mg sin Theta so it's going to be uh
this kx1 and mg sin Theta will get cancel each other finally we'll have KX but f is the resultant Force so that
must be equal to ma a so ma a is equal to KX so a is going to be k / M into X you can see X is the displacement from o
x is the displacement from o is it o is the equilibrium position the displacement downwards is X so a is
directly proportional to X because K and M both are constants so a proportional to X also you can see the resultant
force acting towards the equium position so according acceleration will be towards the equum position X is away
from the equ see the diagram X is away downwards it's X but FAL m f is acting towards the equ position the resultant
Force therefore the resultant Force towards the equ position means acceleration will be towards position
therefore a proportional to Min - x therefore it will be simple harmonic motion same way you can show when it is
towards P to somewhere here the extension will decrease by X1 uh decrease by X so I'll change that again
so same diagram I use it so when it go to the P2 this is I der when it is towards P1 from person the TR goes down
I derived it and show where a proportional to- X so if it is on the left side above o towards P2 when the
trolley is oscillating I told between P1 and P2 so will it be a simple that side or it must be but we show that it's
going to be X1 - x this condition is correct there also when it is at equilibrium position K X1 mg sin Theta
it's going to be X1 - x because xtens is going to decrease when the trolley moves upwards from o this
direction okay K X1 - x so the resultant force uh the resultant Force this is going to be smaller because kx1 balances
mg sin thet now the extens is decreasing so this tension is going to be smaller so the resultant force is going to be
towards the equilibrium position resultant Force f is going to be because this will be smaller than uh mg sin
Theta the tension so the resultant force will be towards o that is going to be mg sin Theta minus K X1 - x so Solve IT mg
sin Theta - kx1 + KX so here Min - kx1 kx1 is already mg sin Theta so here it's going to be mg sin Theta you can
substitute for kx1 you substitute that mg sin Theta and this mg will get cancel FAL KX what's the direction of this F
this direction of f is towards 4 because mty sin Theta greater than this so the resultant force is towards o that is
going to be m a a is going to be towards O So this shows a = k/ m x so here also K and M
are constant so a is directly proportional to X also a is pointing towards the equ position X is from o
upwards but a is towards o so it's going to be a simple harmonic motion so when a trolley attached to a string and in the
tring is kept on a slope where there's no friction when you allow to oscillate the oscillation will be simple harmonic
here also okay fourth example a trolley is attached to two identical Springs uh
spring Conant of each spring is K it's not necessary to be identical but for Simplicity I took it identical uh if
there are any questions related to oscillations with two Springs in your syllabus it will be identical because
otherwise K1 K2 two different spring constants it will slightly more work normally they won't ask that type of
questions I guess yeah so for Simplicity I took both Springs are identical when the trolley is at equilibrium position
each spring has the same amount of extension X1 so the extension of this spring is X1 this also has extension X1
okay so if I draw the free body Force this is the O equilibrium position so if I draw the free body force diagram for
the trolley when it is at equilibrium position the weight and normal reaction balance
each other this side there will be tension T1 that is equal to K X1 this side also there will be tension uh T1
same thing kx1 okay now uh the spring is pulled towards right no reason taking towards
right if you want you can take it towards left just for no reason I'm taking towards right through a distance
a small distance and allow to oscillate but we take this way the questions the spring the trolle is pulled towards
right such that the both Springs are always under tension that means the for example if X1 is 5 cm X1 is equal to 5
cm you pull the trolley towards right maximum five maybe four or three because then only if you pull it to the right
this extension will decrease by for example if you pull it towards right by 4 cm from o the extension of the right
side space will become 1 cm already it extended by five now you are pulling it to the right by four means it will
reduce by four the extension of the right side string will become one the extension of the left string will become
5 + 4 9 if you pull it more than five then this SC will be compressed normally you won't normally there are no such
questions so normally what appeared in the old past papers also I consider and do so the charol is pulled towards right
and release so you pull it towards right such that the amplitude of oscillation is less than X1 okay so always the
Springs both will be under tension okay so it's pulled towards right and allowed to oscillate so it's oscillating between
the points P1 and P2 when it is on the right side the extension is uh sorry yeah the uh the displacement is X so
when the trol is on the right side I'll draw the diagram somewhere here x TR is here the X the displ M from the
equilibrium position this is the equilibrium position is it from the equilibrium position the displacement is
X so if I draw the free body force diagram for this uh situation if I draw the forces acting on it weight and
normal reaction will balance each other so the right side the tension now here the T1 early it was kx1 now the T1 will
become K X1 - x because the displacement from the equ portion is X x is less than x and always we take that with the
amplitude of illation is less than the initial uh extension of the Springs so T1 = kx1 - x here the t2 is going to be
now it won't be the same T1 it's going to be T2 now T2 is going to be K X1 + x okay we know that this is greater than
than this because X1 - x compared to that X1 + x is larger so the resultant force is going to be towards left so
when the trol is on the right side the resultant force will be towards left means it will Point towards o so the
resultant force is going to be K X1 + x - K X1 - x you solve it will be kx1 - kx1 kx1 + KX - kx1 + KX so kx1 kx1 get
cancel you'll become 2 KX careful 2 K comes in case if it is two Springs with different spring Conant K1 K2 then it
will become K1 + K2 X that's the only thing that's nothing K1 plus k2x will come since they are identical SPS it
become 2 KX so the force is pointing towards four resultant force is towards when the TR is on the right side of O
the resultant force is towards o that means f = ma a f = ma a so it's going to be Ma I can write ma a mass of the TR is
m m a = 2 KX so a is going to be 2 k/ m into X so the 2 k comes otherwise if there are two different strings K1 + K2
M into X we know that K is a constant m is a constant therefore a is directly proportional to X displacement X is the
displacement from the ATM position so the acceleration is going to be directly proportional to displacement and
direction of acceleration is along the direction of resultant Force which is pointing towards o therefore
displacement is measured towards right acceleration is pointing towards o therefore a proportional to - x
therefore it will be a simple harmonic motion the same way you can prove by taking the TR on the left side of O the
same results will come there it is will become K X1 + x it will become X1 - x same we get end up with the same result
so here also the oscillation will become simple harmonic motion okay the fifth example a spring
of uh which has spring constant K is hung uh in on vertical plane and when a mass an object or small mass is attached
to it there will be a static extension the spring will extend and come to rest that is called Static extension so the
static extension Let It Be X1 so with the system the uh spring Mass system when it is at rest this position
is going to be the equilibrium position so the position at which the spring Mass system comes to rest when it is not in
oscillation will be the equilibrium position so this is going to be the equilibrium
position okay so when it is at equilibrium position uh the extension of the spring is X1 so when we think about
the forces acting on the mass there will be two forces acting on it uh one is the weight acting vertically downward and
the tension which is k x 1 that is the tension so since it is at equilibrium kx1 will be equal to mg right now from
this equilibrium position we pull the mass further down and release it will oscillate on a vertical plane uh we
imagine when during the oscillation at a particular instant the displacement I already told that displacement is always
measured from the equilibrium position so if the displacement is vertically downward x uh
yeah this is the mass when the displacement is vertically downwards X the total extension of the string will
be X1 + x so that time when I think about the for when we consider the forces acting on the mass the forces
will be downwards mg upwards the tension that's going to be T is = to K X1 + x so when uh it is at the equilibrium
position mg is equal to kx1 but when it is below the equilibrium position the tension will become greater than mg so
the resultant force acting on it will be towards the equ position that is upward Direction so at that moment the
resultant Force when it is at this position with the displacement which is X from the equilibrium position at that
moment the resultant force will be upward Direction so that is going to be FAL uh
K X1 + x that is the tension minus mg okay so there K X1 + KX - mg so it's going to be of kx1 we can substitute mg
so that is going to be mg + KX minus mg that is it will be KX so the force will be equal to KX Newton Second if I use it
that is equal to m so the acceleration will be equal to k/ M into X this will be towards the
equilibrium position that's going to be towards the equilibrium position so acceleration and displacement X is the
displacement when we consider acceleration will be towards the equilibrium position because the
resultant force is towards equilibrium position equilibrium position so the acceleration will be towards the
equilibrium position which is directly proportional to displacement X but X is measured from the equum position which
is away downward Direction you can see the x is downward Direction but uh acceleration is towards the equilib
position so they are going to be in opposite to each other so there will be a minus sign in terms of vectors because
this gives the numerical relationship but acceleration is to towards the equilibrium position but X is downwards
from the equilibrium position which is downwards so the direction of acceleration and direction of
displacement they are in opposite to each other so a proportional to Min - x therefore K and M is constant therefore
I put a proportionality that's the reason it's going to be a simple harmonic motion it will oscillate in
simple harmonic motion okay same way if the mass is above the equilibrium position uh somewhere here if I consider
what will happen we don't need to do both sides but I'm just doing it in mathematics in Mechanics for example M3
we do it in a slightly different way but in physics we don't go to that detailed analysis but here we keep the mass
somewhere here like this so at that moment the displacement is upward Direction
X during that time if I draw the free body Force DM the forces acting on it will be uh weight is acting downward
Direction the tension is going to be when it is at the equili position the displacement is
X1 now it's reduced by X so the extension is going to be kx1 - x kx1 - x is the uh extension of the spring so the
tension is going to be kx1 - x okay when I consider the resultant force during this position when the mass is above the
equum position here also we assume for Simplicity the spring is not compressed at all always the spring is under
tension so always this x will be smaller than X1 or the amplitude of the oscillation is going to be smaller than
the static extension X1 if we take that way and when the mass is above the equ position the tension is going to be K X1
- x okay so when it is at this position when we consider the resultant force is
going to be uh towards the equum because we know that when it is at the equ position kx1 will balance mg now the
tension has decreased which becomes smaller than mg because the extension has become smaller than X1 so X1 - x is
smaller than X1 therefore the tension will become smaller than mg so the resultant force will be towards the
because mg is greater than tension when the mass is above the equilibrium position so the resultant Force f is
equal to mg - K X1 - x so if you solve it mg - K X1 plus KX so here also in of kx1 we can
substitute mg so kx1 we can substitute mg so will becomes KX so the resultant force is KX which is towards the
equilibrium position or downwards when it is when the mass is above the equilibrium position According to second
law it's going to be M A so a is going to be k/ m a constant into X which is going to be towards the equilibrium
position so K or M is constant therefore a proportional to X but X is measured upward direction from the equilibrium
position this is upward Direction acceleration is towards the equilibrium position because resultant force is
towards equum position so the direction of acceleration Direction EX are in opposite to each other therefore a
proportional to Min - x where k/ m is constant so a proportional to minus 6 means uh the system will oscillate or
perform uh simple harmonic motion okay so the sixth example about uh a child uh jumping on bouncing on a
trampoline so you know trampoline it consists of elastic m material on top of it like a elastic sheet on top of a
membrane on top of a uh top of it so when a child stands on it it will deform and the child will be at rest so this
position is going to be the equilibrium position so now the child is bouncing up and down such that it is always in
contact with the elastic sheet or elastic that material so when the child is at the lowest position uh it's moving
from the equum position lowest position the second diagram is third diagram is showing that so the child is at the
equium position so the Sheep will exert a tension on the child upward Direction so in that situation there are two
forces acting on it one is the weight of the child downwards mg and the elastic material the sheet will exert a tension
push upward direction that is T is going to be KX where X is the X1 we can say that is the uh
static extension from compare to the equilibrium position this is going to be the static extension this one when the
child is at equilibrium position okay when the child goes further down during the oscillation
below the equilibrium position the extent is going to be more it's measured from the equium position we can see the
displacement is downwards which is X displacement is downwards X so here the extension is going to be x + X1 EX
exactly same as uh vertically oscillating spring Mass system what is which is the fifth example what I
explained the same uh analysis we can do here also so at this position the child is below the equilibrium position so
there at this position the forces acting on the child there are two forces weight is downwards the tension is going to be
now T is equal to K X1 + x so at the equum position KX is equal to mg so it Bal bces each other now the tension has
become greater than mg so when the child is below the equilibrium position the resultant force is going to be upward
direction towards the equilibrium position so there are the resultant Force f is going to be uh tension minus
mg that is K X1 + x - mg that is K X1 + KX - mg but we know that K T this at the equilibrium
position therefore K X1 is equal to mg so inste of kx1 we can substitute mg so mg minus mg will get cancel so it's
going to be KX that's going to be Newton Second Law according to that FAL
ma FAL Ma so KX is = to m a a is = k/ M into X okay so when we consider this oscillation the system child and the
trolin the elastic material that forms the oscillator oscillating system so they acceleration is towards the
equilibrium position because resultant force is acting towards the equilibrium position the child is below the
equilibrium position so the acceleration is going to be towards the equilibrium position which is upward Direction but
the displacement which is measured from the equilibrium this is the equilibrium position from theum position their
displacement measured downward Direction so they are in opposite each other at the same time k/ m is constant so
acceleration is going to be directly proportional to displacement but direction of acceleration is always
towards the equilibrium position you can see that here displacement is downward Direction they are in opposite direction
to each other therefore a proportional to - 6 when the child is below I can show it is at equilibrium position uh it
performs simple harmonic motion sorry not equ position when the child is below the equili position it performs simple
harmonic motion same way the child is above the equum position I'll draw the next position the child is above the eum
position so I'll use the same diagram so I'll reduce the uh displacement like this and the tremol in the elastic mat
is above the equilibrium position so it's like this way so this is the equilibrium position
so the child is oscillating and when the trambolin sheet the trolin material becomes above the position where the
displacement is measured from the position is going to be upward direction is it during this time also there are
two forces acting on the child one is the weight other one the extension is now decreased earlier the static
extension is X1 when the child is at the equilibrium person from that it started to uh move up and down or bounce up and
down now the extension has become X1 - x at this position X1 - x okay we know that when the child is at K X1 balances
mg now X1 - x is smaller than X1 so the tension is going to be smaller than the mg so the resultant force will be
downward Direction so here the resultant force is towards the equilibrium position which
is downward Direction because tension is smaller than weight so there the resultant Force f is going to be mg
minus t so that is mg minus in of T we can say k X1 - x that's going to be mg - kx1 + KX
so kx1 is equal mg when it is at the equum position I can substitute inste of kx1 mg so mg and mg will get cancel it
will become KX f is equal to KX the direction of the resultant force is downward direction that is towards the
equilibrium position when the child when the the child or when the elastic material is above the equilibrium
position during the oscillation so f = ma a so f = ma a f is towards the equilibrium position so that is KX = ma
a a is going to be downward direction towards the equilibrium position k/ M into X okay you can see when the child
is above the equilibrium position acceleration is again pointing towards the equilibrium position acceleration is
going to be downwards means it's going to point towards the equilibrium position downwards the displacement is
measured from the equili position which is upward Direction so they are among them in opposite direction to each other
acceleration is pointing towards the equum position so a is going to be directly proportional because k m both
are constant k m is constant so a proportional to minus so during the oscillation whether the child is above
the equum position or below the equum position the acceleration will be always points towards the equum position and
the direction of the acceleration will be opposite to the direction of displacement therefore that will perform
simple harmonic motion ACC is also proportional to displacement so it's going to perform simple harmonic motion
so during the oscillation If the child leaves the trampol so when the child there was a question in the past Pap If
the child leaves the trampoline during the oscillation that means maybe the trampoline would have come to this
position something like this maybe the temp have come to something like this horizontal position or something like
slightly upward Direction the child is thrown away from the uh trampoline thrown away from the uh the elastic
material then will that system perform simple harmonic motion no because when the child is in air above the equili
position the only force acting on the child is the weight mg so the only force acting on the child is mg means mg is
equal to M so a is going to be G that means the acceleration acting on the child is going to be constant which is
gravit ation acceleration it does not proportional to the displacement from the so this is the equum position the
displacement of the child from the equ may be X but acceleration is constant that is not proportional to uh
displacement there for it won't be a simple harmonic motion so when the child leaves the trampoline and when the child
moves freely away from the trampoline then the system which we include child and the trampoline will not perform
harmonic motion at that moment because the acceleration of the child becomes constant it won't be directly
proportional to displacement okay the seventh example is about oscillation of a weighted test
tube or small tube uh inside a liquid such as water so initially the tube is at equilibrium when it is at equilibrium
uh the length L of the tube is inside the liquid or water we'll say it so at that situation if you think consider the
forces acting on the system that is forces acting on the uh weighted test tube downward Direction uh weight upward
Direction up thrust I'll draw the whole system the weighted test tube has a small circle easy for that to draw so
the forces acting on the weighted test tube downwards weight mg at the equilibrium position and upwards the up
crust U up crust what you learned in unit one upus is equal to weight of the displaced
uh fluid so the length which is inside water is capital N so the up is going to be weight of the displaced fluid means
or weight of the displaced liquid water we take it as that uh we need to find the ESS volume we need to consider the
volume of the liquid displaced is going to be crosssection area if I say capital A the cross sectional area the length
into L that is the volume into density of the liquid row into G that is the up thrust so at the equilibrium position
the up thrust is equal to weight so a u is equal to mg at the equilibrium position so um from the equilibrium
position imagine you push the test tube little bit down and allow it so the test tube will oscillate in vertical on a
vertical plane so when the displacement this is the equilibrium position the blue color line what I drew so when the
test test tube is at rest so you push it down from the equum position and allow to oscillate so when the displacement is
downwards from the equum position the displacement x x during that situation the ESS is going to be U1 that is going
to be the total length inside so this is L already L was inside so this is anyway again L the equum position which was L
below the level of the upper surface of the liquid so the now the total uh up tress is going to be U1 is going to be
uh the U1 now or you can say even U whatever it is uh volume of the displaced uh liquid is uh cross-section
area into length inside the liquid is L + x into row G so the two forces acting on it one is the weight downwards and
the up now since the tube has moved inside the amount of the water displace or the volume of the liquid displace is
going to be more so up U1 is going to be greater than U so when I consider the resultant force acting on the system the
test tube it's going to be upward Direction because the resultant force is going to be upwards because the uppr is
more now compared to when the tube was at the equilibrium position so the resultant force is going to be upward
direction that is f is equal to U1 - mg so U1 means a l + x uh r g minus mg so that is if you multiply
inside a l r g a l r g plus a x r g minus mg a x r g minus mg so when we consider this Al r g and mg are same so
Al r g i can replace this Al r g by mg so mg plus a a row g x I rearranged it a row GX minus mg so mg mg will get cancel
it's going to be a row g x the resultant force that is acting upward direction towards theum position so new second L
this is going to be M so acceleration will be along the direction of resultant for you learn
that in unit one so acceleration also will be towards the equilibrium position that is upward Direction so if I make
the a subject a is going to be a row G over M into X which is upward Direction when the tube is below or the weighted
tube is below the equilibrium position so the acceleration is upwards means it's pointing towards the equilibrium
position but X is the displacement we measured from the equilibrium position so displacement is downward Direction
acceleration is upward Direction this all constant cross-section area constant density of the uh liquid constant G
constant total mass is constant so these all are going to be constant so a proportional to Min - x because they are
in opposite direction so when the tube is below the equum position what will happen uh a proportional to minus x a
acting towards the equilibrium position therefore it will perform simple harmonic motion when the test tube is
below the equilibrium position same way when the tube goes above the equilibrium position something like this if we
consider the tube goes above so there we can draw a diagram again like this it has gone up above the equum
position this waited to so this is the equilibrium position uh so the displacement is
upward Direction so the length of the test tube inside the liquid is now it's going to
be L minus this whole thing is L so it has gone up above the equilibrium position so that so you know that from
the surface of the liquid to equilibrium position is the L capital L so the same thing this is the capital L from the
surface of the liquid so from the surface of the liquid to this equilibrium position so equ is
drawn with blue color line This is L from here to here is L from this position to this position is L is it we
take that as L now the length actually inside the liquid is going to be this much that is going to be l - x so that
is going to be l - x is the length of the tube inside the liquid so l - x is smaller than l so what will happen the
uppr is going to be now l l - x now we can say the upas is l - x so when it is at the equilibrium position the upus is
equal to weight but now Theus becomes smaller than the upus when it was in the equum positions therefore the resultant
Force going to be upward Direction sorry the resultant Force going to be downward Direction because the upus has become
smaller now so when we consider the resultant Force it's going to be mg minus U1 when the tube is above the
equilibrium position so mg minus U1 when the tube is above the equilibrium position so that
is going to be mg minus U1 is a l - x r g so that's going to be mg - a l r g - a r g x a r g
x okay so inste of Al r g i can substitute mg so this mg and this mg will get cancel
mg - mg minus a uh sorry plusus Inus plus a r g x okay so that is going to be F the resultant force is going to be a
row g x which is the direction is downward Direction because mg greater than U1 so the resultant Force when the
test cube is above the equum position that will be downward Direction so that's going to be
M so the acceleration will be downward Direction so a is going to be uh a row g/ M into X acceleration is downward
Direction acceleration will be downward Direction but the X displacement is measured upward Direction so they are in
opposite direction to each other also you can see acceleration is directly proportional to displacement
acceleration is pointing towards the equ the weight test cube is above the equ position pointing towards the equ
position so a proportional to minus so it will perform simple harmonic motion so I separately did below the equ
person above the equ person make you to understand so whatever the direction it stays whatever the direction it is in
motion whatever it is the acceleration is towards the equum position and proportional to displacement such that
the displacement and ACC have opposite direction among them so it will perform simple harmonic motion
okay so I summarized all the examples I did the first example I didn't write because I told that uh when a small ball
bearing oscillates on us two incline planes like this which make Theta Theta that won't behave or that won't show
motion so I didn't draw that other than that all other six examples I drew it so in all these examples we came across uh
we gave a conclusion a proportional to - x a proportional to- X means k k m is constant k m is constant 2 k m because
here 2 K CES there are two Springs identical Springs attached on either side of the TR so here k m constant so
here trampoline also k m constant a g m constant so everywhere there is a constant there so generally I can
conclude in simple harmonic motion the acceleration is directly proportional to its displacement with minus sign
indicates they are in opposite direction to each other so a equal to Min - CX I can say there's a constant C the C could
be different for different uh examples for example here the constant C is 2 k/ m but in all these others k m k m k m
but here the constant is a r g/ m when weight at T cube oscillates in liquid anyway whatever the constant could be
different for different types of uh oscillators but there is a constant C Okay so what is the meaning of this
constant what does it mean what's the physical meaning of this constant we need to know that okay so to identify
actually what this constant C represents in simple harmonic motion we know that simple harmonic motion occurs or happens
in one dimension either up and down you can see all these things it's happening uh left and right one dimension this
also one dimension on a slope either along the slope or upward in a slope this is this is one dimension left or
right this one dimension up or down one dimension up or down this also one dimension up or down so the oscillation
simple Harmon motion happens or happens in one dimensional motion either up or down or left or right like that okay so
what is the meaning the physical meaning of c we want to find it okay so actually uh to relate or get a physical meaning
we need to relate the simple harmonic motion could be related actually simple harmonic motion could be mathematically
related to circular motion even when simple harmonic motion is not happening in circular path when we consider the
circular simple harmonic motion there is no circular motion actually it's happening in one dimension circular
motion happens in two Dimension but even there is no two dimensional Motion in simple harmonic motion that happens in
one dimension even that way it happens mathematically m matically we can relate the simple harmonic motion to circular
motion from that we can identify the physical meaning actual meaning of c what could be the effect of C for
example in this particular oscillation what will happen if the constant increases by increasing the spring
constant of the spring or by reducing the mass attached if I increase the constant what will be the outcome we can
find it same way here also by increasing the density of the liquid we can increase the uh constant C related to
this oscillation so what could be the outcome of that we can identify so to identify that we should know the meaning
of c okay that could be explained by using a circular motion mathematically okay so we'll consider a
particle is moving on a circular path of radius capital A Center is O moving on a circular path at constant angular speed
Omega for Simplicity no reason I can't take initially anywhere but for simple thing I took it initially the particle
is along the diameter in horizontal position at this position initially when t equal 0 later at time tal T the
particle has come to this position so when we draw a projector projector means a vertical line from the particle to the
diameter I consider the horizontal diameter we can draw any diameter but simple thing I we consider a horizontal
diameter so if you draw a projector from the particle to the diameter the base of the the the projector touches the
diameter which is in horizontal position at Point N so the distance of the n n is the projector drawn from the particle to
the diameter the distance of the N from o is X X which is directed towards right so in this right angle triangle we know
that X is going to be X is going to be a COS Theta but the particle is rotating moving at constant angular speed Omega
therefore we can say Omega = Theta / T from the Theta isal Omega T So X is going to be a COS Omega t Okay so X is
the position of the distance of the projector from o you can see that imagine that when the particle moves
from this position I'll name this position as initial position P this as Q when the particle moves from p in
anticlockwise Direction the projector when the particle is at P projector n will be at P when the particle moves
this way the projector will move towards o o when the particle is at exactly at this position exactly above o the
projector n will be at o when the particle moves further towards left the it will move from o to Q so initially
the projector was at this position here if I say this is O the pro will move from a p to
O then when the particle moves to O it will move from here to here to Q when the partic comes to this
this position but if I draw a projector again the projector will move from Q to O then again from o to P so that means
simply I can say when the particle completes one full circular path the projector will drawn to horizontal
diameter will move from P to q and again from Q to P so when the particle completes one full circular part the
projector will complete one full oscillation about o about o so the time taken for the circular motion and the
time taken for the projector to complete one full oscillation will be exactly the same okay so that's a comparison we are
going to do right so we know that x = a COS Omega T okay what could be the I told that the particle is moving at
constant angular speed Omega so when the particle moves at constant angular speed what could be the speed of the projector
in when we measured uh that's going to be differentiation anyway not in the physics but just for your information
that's how your knowledge I'm doing it when you differentiate x with respect to time that is speed is going to be DX
over DT when you differentiate this it will become minus a Omega sin Omega T when you differentiate cos it will
become minus s you add a different when you differentiate Omega to become Omega so minus a Omega sin Omega T that's
going to be the speed and don't worry you so that is the speed of the projector end when we measure when you
differentiate again we'll get acceleration of the N when the particle moves on circular path around it so the
acceleration is going to be d/ DT or d2x over DT to dv/ DT so when you differentiate the velocity again with
respect to time you're are going to get minus a Omega again this Omega comes out so a Omega into Omega a Omega s
s will become cos Omega T so that's going to be - Omega s a COS Omega T So a COS Omega T is
going to be X so that's going to be - Omega s x that is the acceleration see now you can see that the projector n has
an acceleration that also have the same format what we got earlier in all examples a is equal to a constant minus
C into X format you can compare that both when we consider the acceleration of the projector in that a is equal to-
Omega s x x is the displacement we can call which is measured always from Center o when it oscillates in circular
path it's going to oscillate on the diameter so we can consider this as the equilibrium position because it's
oscillating on either side so so mathematically when you compare both are both are similar equation a a x x x is
measured from the equal position so C is the constant I came across in all examples there's a constant C that c
gives angular spe Omega squ so you might ask how angular speed is related to one dimensional oscillation Yes actually
angular speed is not related to one dimensional actually the simple harmonic motion is not performed in two dimension
actually moving on one line but mathematically we can relate the constant what we observed in the
previous examples constant c as square of the angular speed now we'll forget about C that we can replace by Omega
Square so in all those examples what we came across for all type of simple harmonic motions the constant what I
told is going to be Omega squ so a is going to be minus Omega s x in circular motion I told that when it completes one
full circular path the project will complete one full oscillation so Omega we know that for circular motion Omega =
2 Pi / t or Omega = 2 pi F we know that so the time period of the circular motion what we imagine here and the
oscillation have the same exactly time period so when we C all the simple harmonic motions the six examples but in
all those six examples Omega squ indicates angular speed but angular speed won't be something Irrelevant for
the simple Harmon motion looks like that but we can say of Omega that is going to be 2 Pi / T minus 2 pi/ T now it has
meaning 2 Pi / T all s x that means we can say acceleration of a simple harmonic motion is equal to - 4K s
square of the time period of cation simple harmonic motion has a constant time period into X we can say that way
then it has meaning where T is time period of the simple harmonic motion how I got this T by comparing the circular
motion and the simple harmonic motion mathematically we got it there's no there's another way also there but I'll
do it at the end of this lesson without comparing circular motion and simple harmonic motion also we can get the
actual uh meaning of c but little bit of differential equation like a second order differential equation we have to
use it but anyway like d2x over d22 that is the acceleration is equal to dt2 is equal to
uh uh minus uh yeah that is equal to uh minus CX from this we can show that but any I don't want to go to in that
detailed mathematics if you want I can do it at the end we'll see if I want I can do that finally at the end of of
this lesson but anyway you know that acceleration is equal to - 4i 2/ t² we can then there is a meaning t² is the
time period of the simple harmonic motion the time Tak to complete one full oscillation t² into X or you can say a
isal to - 2 piun F all in s x then that is meaning where the constant is 2 pi * F okay f is the frequency of the simple
harmonic motion okay so in this example we took the radius of the circular path is capital A
that is actually the amplitude of the uh simple harmonic motion amplitude of the simple harmonic motion so a I took it as
the radius of the circular path that is actually the amplitude of the uh simple harmonic motion also here we took the
oscillation initially the particle was at p and it's moving in anticlockwise Direction so we got X a COS Omega T that
means if the particle is moving initially from the positive displacement maximum position initially if the
particle is at P that means when I consider the simple the equivalent or the relevant simple harmonic motion when
the particle is at p in circular motion in simple harmonic motion it has the maximum displacement which is equal to
amplitude a so initially when t equal Z when the particle is at the maximum displ M position in simple harmonic
motion initially if the particle is at the maximum displacement position that means at the extreme position and then
later at a point here means somewhere here when the particle comes the time taken t for motion from P to this
position the time Tak is t means the displacement from the equilibrium position X is given by x = a COS Omega T
you must know that the displacement is given by x = a COS Omega T that means initially the particle is at the maximum
displacement position that is Extreme position then it's moving towards the equ position so it's moving in circular
path anticlockwise Direction so here the equivalent Sy harmonic motion is moving towards the equum position at time T the
displacement is X means that is given by x = a COS Omega T when initially the particle is at the extreme position but
other way also we can consider the the particle was initially here we'll consider the particle was initially at
the equilibrium position means the particle is initially at this position then it's moving from o to p means it's
rotate moving in this direction so initially that is t equal Z if the particle is here not here initially the
particle is here and rotating in this direction this direction it's moving at constant angular speed Omega so in that
situation uh we take the angle this as Alpha this as Alpha if I consider lat at time tal T it
rotated from this position this position through angle Alpha means the Theta is going to be 90- alpha or if I consider
this as Alpha then this as Theta so the alpha is going to be 90 minus Theta so in that situation the displacement on
the same horizontal uh diameter that's going to be x = a COS Theta inste
of cos Theta I should say xal this x equal a
COS 90 - Theta cos 90- Theta is going to be sin Theta x = a sin Theta you know cos 90- Theta = sin Theta so that means
if the particle was initially at the equilibrium position at o and lat at time T it has a displacement from the
equum position which is X and it's moving towards the extreme position then later at time T the displacement is
given by xal a sin Omega T inste of theta we can put Omega t x = a sin Omega T so that also
you must know you should know where to use which equation that means initially if the particle was at the extreme
position and late at time T the displac is given by xal a COS Omega T but if the particle initially at the equilibrium
position then later at time T displac by x = a sin Omega T so you should know we to use each equation uh remember that
initially if it is at the equum position lat at time t xal a sin Omega initially it is at the extreme position lat at
time DX = a COS Omega t so in all these examples again if I consider the example which I did second
first one was not simple harmonic motion when a marble or uh like a ball bearing OS slates on a two incline surfaces it
won't perform simple harmonic motion that's the first example I discussed so I'm not going to consider that anymore
uh the second example what I showed in my the previous examples that I put it as first where strongly oate on
horizontal line we horizontal plane a is = - k/ MX we got it so that means that's Omega s x is it Omega s x because it's a
constant k m is constant I already showed by comparing the simple motion and the circular motion
the constant is Omega squ so that means Omega squ is equal to a/ M that is Omega is going to be square root of k/ M that
is omega = 2 Pi / T from the T = 2 piun m/ K from this we can find the time period of oscillation if I know the
spring constant and mass of the uh mass of the trol same way where it oscillates on a slope like this I deriv it but I'm
not going to do again there also INR oscillates on a slope something like this they are also uh the equation we
got exact the same so for that also the time period will be T = 2 m/ K okay so then when we consider uh trolley which
consists of uh the next example I put two but not exactly the same earlier two TR which is attached to uh two Springs
with same identical spring constant uh there I showed that uh a equal to - 2 k / M into X so this is = -
Omega 2 x that is Omega 2 = 2 k / M if the Springs constants are different then it will become K1 + K2 but rarely that
type of questions comes identical Springs is a simple thing that's the way the questions come normally so Omega S =
2 K Over M so that is Omega is going to be square root of 2 k/ m careful uh not km there are two Springs so that's the
reason 2 km if there are different Springs with different spring constants K1 K2 that will become 2 k sorry it will
become K1 + K in that situation you can try the derivation Omega squ will become K1 + K2 over M that's the way you will
get it okay but here identical spring so 2 K K1 K2 both are same so k + k 2 K we are getting so Omega = 2 Pi / t
so T is going to be 2 piun of m/ 2 K but if the spring constant are different there you will get uh Omega is going to
be in that example Omega is going to be square root of K1 + K2 / M that is 2 Pi / T So T is
going to be 2 piun < TK of m/ K1 + K2 get it if the spring constant are different for the trampoline also uh the
example which related to trampoline they are also the equation was the same as earlier that if we got a = - k / MX so
there also the time period is exactly same as this one I don't need to work it out again because you can compare the
same format we are getting for the trampol see the thing again if you want same pattern we are getting so the time
period will be exactly the same for the trampol only this is the different when there are two Springs remember the
spring constants different same spring constants for the both Springs okay next is uh for the
oscillation of the weight test tube when it oscillates in liquid uh we obtained uh the equation a
= - a r g/ m into X is it that's the way we obtained earlier so here it could be compared as a = - Omega 2 x Omega s is =
a r g/ m uh that is Omega isal toare root of a row g/ M that is equal to 2 < / T so the time period T is going to be
2 Pi squ root of uh m/ a row G okay so here I asked that what will happen to the oscillation with
the density of the water is increased when the density of the water increased the time period is going to be smaller
time period is smaller means we know T isal to 1/ F the frequency will become higher when the density increases for
example uh same um weighted test tube could be oscillated in pure water and salt water salt water higher density or
pure water and oil where oil is uh lower density whatever it is when we think about two different media the same
weighted uh test tube is oscillated uh separately in during different time so the row could be different when higher
the row lower the T lower the t means higher the frequency the rate of oscillation will increase so after after
we compare the circular motion simple Carbonic motion now we know the meaning of c what could be the outcome of
oscillation even when we consider this equation what I just now got T = 2 Pi root of m/ K for a trol attached to a
string and the mass of the trolley increases time period will decrease frequency of oscillation will increase
like that we are now able to analyze the outcome of oscillation when one of the constants
varies how when when rather than saying when of the constant is varies whenever one of the constant is changed by the
experimental what could be the outcome we know that now by using this a = minus Omega s
x okay next thing is about SLE pendulum simple pendulum means uh uh an inextensible string one end is attached
to a fixed point and the other end is attached to a small Bob and it will oscillate about the fixed Point uh from
from where the string is attached say when the uh string when the symbol pendulum is at rest this is going to be
the uh equilibrium position the position will be taken as the lowest position so it will oscillate something like this
path on a segment of a circular path when it is at this position when we consider the position here the
displacement of the uh symbol pendulum will be measured from the equilibrium position so this is the equilibrium
position so the displacement is going to be this what this is the displacement so at this instant the string makes an
angle Theta from its equilibrium position so this is the equilibrium position okay so
uh we are going to check whether the simple this symbol pendul follows the condition for the symbol harmonic motion
it also I told that already the start of this lesson all the oscillations are not simple Harmon we'll see whether this
type of oscillation a simple pendulum does it show uh the does uh is the oscillation of simple pendulum is Syle
harmonic motion we are going to check that okay for that uh we need to consider smaller angles because
otherwise it's difficult to show that for example when it is at this position this is the equilibrium position o
when it has this position we can say the position p uh the weight is acting vertically down mg mg is the weight
acting downwards uh it makes an angle Theta with vertical means this angle is going
to be Theta so this also will be Theta here this side uh this also will be Theta
here okay if I want to resolve the weight so there are two forces acting on the B one is weight the other one is
tension right if we want to get a component of these forces towards the equilibrium position the Simplicity the
condition what we need to consider here is uh when we take smaller angle Theta what will happen uh the component say
when that will become Theta you know if I consider this triangle this triangle if I name it this point O this is uh
this point is named P if I say this name Point Q when I cuts the triangle o
QP this length is l l is the length of the string the same string so this also l so this o qm is an isoceles triangle
so these two angles will be the same if I take this angle Alpha this also will be Alpha is it in this triangle o QP if
this is Alpha this also Alpha because these two sides are same so we know that Theta + 2 Alpha is = 180 if the Theta is
very small almost something like 2° 3° something like that very small angle uh then what will happen Theta very small
means uh I can compare to 180 that is negligible so I can say approximately 2 Alpha approximately equal to 180 so
Alpha is going to be 90° that means when the Theta becomes very small something like 3° 4° something like that this
angle will become almost 90° so that means the displacement what I consider from the equum position will be
perpendicular to the tension the displacement will become perpendicular to the tension that's I want right so
when the Theta becomes very small Al I showed it will become almost 90 not exactly 90 almost equal to 90 then that
means the displacement what I showed by X will become perpendicular to the string perpendicular to the string uh
that means perpendicular to the tension so in that situation uh this is 90° so I'll draw a line something like this
again I'll draw it this triangle here this is a TR line so this is almost 90° so if this is 90° what happen uh this is
90° so this is Theta this going to be 90 - Theta see this angle this angle will become 90 minus Theta that means
the weight will make an angle 90- Theta with the displacement so the tension is going to
be perpendicular to the displacement so in that situation if I draw the free body force diagram the weight is
vertically acting downwards mg the displacement X makes an angle 90- Theta this line the blue color line what
I drew here that will make an angle 90 minus Theta with mg and the tension will be perpendicular
to the displacement so this is 90° so tension won't have any component along the line that shows the
displacement okay so the only force acting on uh the B towards the equili position is going to be mg cos 90- Theta
so the resultant for force acting on it towards the equilibrium position the resultant Force towards the equilibrium
position that is called restoring Force earlier also we came across restoring force in all my examples in earlier so
the resultant Force towards the equilibrium position is going to be mg cos 90 - Theta is going to be
ma that is mg sin Theta is equal to F that is a is going to be G sin Theta this is true when Theta is very small
here also I can write when Theta is small angle a very small angle in that condition only I got it
Alpha 90 and the displacement perpendicular to the tension I got all those conditions when Theta is very
small so a is going to be G sin Theta and you know this force is acting towards
towards oh the equilibrium position so the acceleration is towards the equilibrium position okay so here sin
Theta comes how can I eliminate the sin Theta we know that when the angle is very small when Theta is very small sin
Theta is approximately equal to Theta in radient we know that so I can say this is a isal to G
Theta okay now we'll consider approximation now we know that if this isoceles triangle the length x will be
almost the displacement X will be almost equal to the length of the segment drawn part of a circle the length of the
segment but we draw by black color line dot dot dot is almost equal to the displacement X because Theta is very
small so in that situation we know the length of this Arc is given by the length of the Ark if I say s that is
equal to the length of the Ark s is equal to R R Theta we know that R Theta here R is l l Theta but L Theta is going
to be almost equal to that is s which is equal to displacement for small angle so that's going to be X so Theta is going
to be x l when Theta is very small so this I can write a is equal to a is equal G inste of th I can write
X over L that's going to be G L into X that is a we know that a is already pointing towards the equili
person the resultant force is acting towards the equ person along this line the displacement drawn the same line so
is towards the equilibrium position X is measured from the equilibrium position they are in opposite direction to each
other and we know that gnl both are constants so since gnl both are constants this is going to be a
proportional to - x again I tell here g l is constant a is pointing towards the equum position o x is measured from the
equ position so they are in opposite direction to each other also since G is constant a is directly proportional to
minus X where a is pointing towards a so simple harmonic motion uh sorry simple pendulum also performs simple Harmon
monic motion but the important conclusion is when the angle of oscillation is very small within 5° or
something like that such that where the length of the segment length of the segment of the circle the dot dot line
and the displacement becomes equal in that situation sin Theta equal to Theta so when it has a small angle of
oscillation uh simple pendulum performs simple harmonic motion so G so we can write again so I'll write
this from this I can write everything together again so a proportional to s that is a is equal to g/ l into X so
they are in opposite direction so a equal opposite direction so minus X if I say - G / l x that is a = - Omega 2 x
Omega s = g/ l Omega = < TK of g l that is 2 Pi / T So T = 2 piun of L G this a standard equation given in the data
sheet also this a type period of simple harmonic uh simple pendulum okay so the condition very important Theta must be
very small so we can say when Theta is very small okay so if I summarize up to what
we learned the first equation what we learned is AAL - Omega 2 X or we can say a
proportional to - x the constant is Omega squ what's the physical meaning of Omega we know that Omega equal we did
already 2 pi F so Omega indicates uh how fast the oscillation happens in a normal way if I say very simple way Omega
indicates the physical meaning it shows how fast the oscillation could happen that means uh for a oscillator with
higher Omega the oscillation will happen at higher rate per second we can say simple day because Omega is 2 pi f when
F increases Omega will increase so higher the Omega uh that means the rate of oscillation will be higher that's the
physical meaning of the constant what relates a proportional to minus X okay second we got an equation for
displacement x = a COS Omega T we must know where to use this equation the other one is xal a sin Omega T so what
are the uh conditions to use the these two equations xal a COS Omega t means if the oscillator initially at the extreme
position extreme position means position where the displacement is maximum initially when T equals z if it is at
the extreme position and later at time T its displacement is given by xal a COS Omega we'll do questions later the
second xal a sin Omega T what's the meaning of it initially when t equal Z if the oscillate is at the equilibrium
position then later time T if I want to define the displacement it's given by x = a sin Omega T okay then we should know
the equation for the velocities also if x = a COS Omega T then the velocity is given by V equal you know to
differentiate but equation is given in the data sheet so remember that or you can see the data sheet if x = a COS
Omega T the velocity is given by - A Omega sin Omega T if x = a COS Omega T so that means if the displacement obas
this format then the velocity of the uh oscillator at a time T is given by b = - A Omega sin Omega
T same way if the displacement obeys this equation then the velocity is given by a Omega cos Omega T if
xal a sin Omega remember this equation so you can see all the uh displacement with time velocity with time they all
follow s shaped graphs sinodal graphs yeah okay so we know that AAL minus Omega s x how the acceleration varies
with time so that also we can relate AAL minus Omega s in so X you can substitute a sin Omega t or a = - Omega s I'll
write the COS everywhere I'm writing cos so I write a COS Omega T or- Omega s a sin Omega so that means the graphs of
I'll show that graph the graphs of displacement Against Time displacement Against Time displacement based time
that is a sinus s graph cosine or sign same similar shape the face difference is 90 the same shape you know the shape
of the graph s or cos same way velocity Against Time that also the same pattern s or cos graph acceleration Against Time
that also s or C shape of graph Al same similar shape that is s or cos shape of graph okay so next you must
know uh what could be the max maximum velocity anyway I don't want to show in mathematical format but better remember
what I'm going to give as conclusion so these are the four points then the fifth point I'll write it here the maximum
velocity happens where does it occur maximum velocity occurs at the equilibrium position which is given by V
maximum equal a Omega remember that maximum speed you know the speed is changing with time sign shape maximum
speed or maximum velocity magude of the maximum velocity is a Omega at the equilibrium position equilibrium
position remember that you must know that then maximum acceleration a Max the maximum okay uh
before that minimum speed minimum speed what is the minimum speed V minimum is equal to Z because it's sign
shape there will be zero com Z so minimum speed that is zero where it happens at the extreme positions at the
extreme position left and right or up and down the extreme position okay then seventh
equation acceleration maximum where it happens that's you know that AAL Omega s x Omega is constant when X becomes
amplitude capital A negative sign we don't need numeric Al we are analyzing where X becomes capital A A maxal Omega
S A Omega S A that happens at the extreme positions left and right or up and down the extreme position where the
amplitude happens at the extreme positions then the eighth one a minimum where that happens minimum acceleration
is zero at the zero at the equilibrium position so I concluded the whole thing
but we learned so far this equation is applicable all these common for all the type of oscillation we came across now
oscillation of a trolley or mass horizontal plane oscillation of a mass on a slope with a spring oscillation of
uh spring Mass system in vertical plane oscillation of um trolley with two Springs oscillation of uh trampoline
oscillation of uh weighted test tube inside liquid oscillation of simple pendulum for everything we can use all
these equations all these equations applicable for generally for all type of simple harmonic motions better remember
these things where are the maximum occurs what is the maximum where the minimum occurs where is the minimum
better remember that also okay so based on this we'll do few numerical calculations
now okay so this is the first question we need to find the angular speed of this o so it says that a pendulum
operates a grandfather clock is released from its maximum displacement position that means initially when tal Z if I
consider tal Z the displacement is maximum that is the displacement is maximum means this is 10
cm okay uh it swings completely through one cycle every 2 seconds means the time period is given T isal to uh 2 seconds
so first part they have to find the angular speed so answer for the first part Omega = 2 piun / T that is 2 piun /
2 that is pi radians so pi means the time period is equal to 34 radian per second that's answer for
uh first part okay the second part of the same question find the distance of the B that
is displacement distance of the B from the reference point is given from the equilibrium position at 8.2 seconds so
initially it was released from the extreme position so when t equal Z The Bu was released such that the
displacement uh is a small oscillation so I already told that initially the displacement was
10 cm so if you pull an oscillator from the equilibrium position through a particular distance and released that
initial distance from where you release will become amplitude of the oscillation again I'm telling if a oscillator is
moved through an equilibrium position a particular distance through a particular distance from the equilibrium position
and released the initial distance from what you push the uh oscill from the equilibrium position that distance will
become amplitude during the oscillation so in this example the pendulum Bob is pulled through a
distance of 10 cm and release means 10 cm will become amplitude during the oscillation so the amplitude is 10 cm so
initially it was released from the extreme position I already gave two equal equations to find the displacement
one is X = a COS Omega T then the second one I gave x = a sin Omega T I already told that this equation we use if the
oscillator is initially at the extreme position then to find the displacement later at a particular time we use x = a
COS Omega T initially if the oscillator is at the equilibrium position and if you want to find the displacement later
at time T we use equal a sin Omega T so here the oscillator the symbol pendulum is released from the extreme position
means initially we had use x = a COS Omega T so uh find the distance of the above
from the equilibrium position at 8.2 seconds so that means at 8.2 seconds what will be its displacement that's a
question so xal a the amplitude is 10 cm into cos Omega 2 Pi / T into T okay so we'll
substitute 10 cos uh Omega we already found it in the previous part or we know that t time
period 2 seconds so 2 piun / 2 into time T is = to 8 to solve it when you solve your calculator must be in radian mode
because we are using in radians C 2 pi is a radian so solve this you will get 8.2
CM sorry it's at 8.09 CM that's answer not 8.2 8.09 CM okay so the second question a science
mum has a giant demonstration tuning fog something like this tuning fog you know that this are the prongs the prongs are
vibrating in simple harmonic motion uh and uh the period of the vibration is 1.2 seconds so period capital t is 1.2
seconds and starts vibrating from amplitude of 807 so that means initially it has an amplitude that is it is at the
extreme position initially when t equal Z it has a maximum displacement which is uh uh 18 cm calculate the displacement
at 5 seconds so initially it is at the maximum displacement position which is 80 cm we need to find the uh
displacement at 5 seconds from that extreme position initially it was at extreme position so the equation that we
need to find use here is xal a COS Omega T we can use xal a sin Omega T if the oscillator was initially at the
equilibrium position so here it was at the extreme position initially okay so amplitude we know that 80 cm we can do
it in meter or cimer so we'll do it in cenm so 80 into cos we know that Omega equal 2 Pi / T So cos 2 pi/ time period
is given 1.2 into 5 uh you should keep your calculator in radian mode solve this you will get 40 cm
or you can say 0.4 M that is the displacement at 5 Seconds second part we need to find the speed in uh 5 uh
seconds I already gave the equation all I gave it as a summary so if the displacement is given by xal a COS Omega
T then speed is given by x = a Omega sin Omega T there will be a minus sign I don't need it when you differentiate
this becomes minus that we don't need to consider we dealing with speed only the magnitude so a Omega sin Omega T So
amplitude a is 80 cm we can say 0.8 Omega 2 pi/ T 1.2 into s uh 2 pi/ 1.2 into at 5 Seconds 5 this
much of m/ second solid you will get 3.63 m/ second that will be the speed of this prong uh at at 5
Seconds okay so for a simple harmonic oscillator it acceleration at the extreme position is 1.5 m per second so
and we know that I put a show it on a table the acceleration will be maximum at the extreme position so it is given
by maximum that is a Max at the extreme position is equal to Omega squ a so that is equal to 1.5 m/s squar and the speed
at the equ position that also maximum maximum speed occurs at the equ I gave it on a table uh so that is V Max that
happens at the equature that is a Omega or Omega a so Omega a we can write Omega a that is uh
0.5 m per second okay so first part find its period of illation so by using these two data we need to find the period so
we can say this is first equation second equation uh divide first equation by the second
equation Omega S A over Omega a that is equal to 1.5 / 0.5 so a a will get cancel that going to be Omega = to 3
that Omega means 2 Pi / T = 3 we need to find the t t is going to be uh 2 5 by 3 seconds that is
2.09 seconds that's the period of oscillation second part find the
amplitude of the oscillation so you know that Omega = 3 you found it substitute in the second equation just with simple
by using the second equation substitute Omega = 3 you will get the amplitude so second
part from the second equation Omega a isal 3 we know Omega 0.5 we know Omega = 3 so 3 a =
0.5 find the a you will get 0.16 m okay the fourth question a trolley of
mass 500 G is attached to one end of a uh one end of a spring and the other end of the spring is attached to a fixed
point the uh spring cost of the spring is 100 Newton per met the trolley oscillates on a horizontal plane with
amplitude of 8 cm find the maximum acceleration first part so that means uh we can draw a diagram something like
this uh 500 G the mass and K is equal to
100 okay so it's oscillating in horizontal position so the only force acting on the unbalanced force acting on
the trolley is the tension the weight and the normal reaction balances each other we know that according to hooks
law FAL KX X is the extension of the spring so here extension of the spring and the displacement are the same
because when it is at the equilibrium position the spring will have its natural length so extension during
horizontal oscillation with one spring remember that extension and the displacement will be
the same same way compression and the displacement also the same only the vertical oscillation when the spring
hungs vertically there will be static excident next question I'll do like that but in horizontal illation the
displacement and the um displacement and the extension or the displacement and the compression when the spring is get
compressed will be the same so ifal KX according hook slow X is the extension of compression but there that is going
to be the uh displacement also right okay so now F Max the maximum force that is the
maximum tension occurs maximum tension T Max not the time T tension maximum occurs when the
extension becomes maximum extension becomes maximum means that is the maximum displacement during horizontal
oscillation maximum displacement that is the amplitude so F Max equal to K A K A that is equal to ma according to
Newton's Second Law okay so K is given 100 amplitude is given uh 8 cm so 8 into 10^ - 2 equal mass is 0.5 * a find the
maximum Accel a Max because this force is maximum means acceleration will be the maximum solve it we'll get the
maximum acceleration that will be equal to yes 100 yeah that's going to be 16 m
per second squ okay so that's the answer for the first part 16 m/s square is the maximum
acceleration second part find the period of oscillation so second part we know the max maximum a Max that
is Omega S A that is a Max equal minus sign we don't need Omega S A Omega is equal
to 2 pi/ T So this going to be a Max = 2 Pi / T all things squar a so a Max we know that 16 is equal to uh 2 piun / t
or 4 pi i^ 2 / t^ 2 * amplitude is uh 0.08 / 100 0.08 find the T from
here this is 4 that is 0.44 seconds I got this answer by using this
answer but I got here a Max from that I got it or you can use the equation given in the data sheet T = root of T = 2 of M
K you can use that also directly so this is one method I use it the other method second part again I'm doing you can use
T = 2 piun of m/ K that's given in the data sheet you can use that directly 2 piun of 0.5 over 100 you'll get exactly
the same answer if you use this Al this easy I think but I just did it by using the first answer I got the second answer
here but you can use this directly this equation given in the data sheet so you can use that directly you'll get the
same answer 0.44 seconds okay so fifth question a spring HS vertically from
support a mass of 800 G is attached to the lower end of the spring static extension of the string is 4 cm find the
string constant so the static extension means uh when you hang the spring that's without any Mass that's going to be the
natural length without any Mass we take a light Springs in all questions we take the spring as a light spring no mass for
the spring so when you attach a mass to its end there will be extension and the spring will be at
rest so this is the static exent it comes to rest so at the rest position when it comes to rest at rest when you
consider the forces acting on the attached MK there'll be weight mg and the static extension if it is we
call X1 then there'll be tension T isal to K X1 so at the equilibrium position this
is going to be the equilibrium position from where this system we say the whole system comes to rest or the position at
which the resultant force is equal to zero that's going to be the equilibrium person when you pull it and leave it it
will oscillate about this one I already did all these theories go through it uh when I start this lesson so during that
t = to kx1 that is equal to mg at the static extension that is going to be the equilibrium position so at the
equilibrium position kx1 is equal to mg so we need to find the K so K into X1 is given static extension 4 cm mean 0.04
equal to the mass is 800 G 0.80 into 9.81 find the K that is the spring constant that will be
1962 Newton per me second part find the period of O that's very simple they have given uh the uh they have given the
equation T = 2 piun of m/ K so 2 pi square root of M that is 0.8 over k
196.000 4 seconds so that is 0.40 okay so the up to uh second part we did
it now the third part it has two parts A Part B part third part from the equum position the mass is pulled down through
3 cm and then release so already the static extension is 4 cm from the equilibrium position is pulled down
further through 3 cm and then release a part State the amplitude of the oscillation so remember that from the
equilibrium position if you pull whether it's a horizontal oscillation or vertical oscillation whatever it is for
any type of oscillator whether it is a test tube oscillating in uh water or simple pendulum or trampoline whatever
it is from the equum position if you pull or push the oscillator through a particular distance and released the
during the oscillation the distance through to which you pushed will become the amplitude so here nothing to
calculate so that's the reason the question says state so it's pulled down from the equilibrium position through 3
cm and then release means a part the answer answer a part the amplitude of the oscillation will be 3 cm that's all
there's nothing to uh work out there just 3 cm is going to be the amplitude from the equum position through what
distance you are pulling it and leaving that distance through what you pull from the equ position will become amplitude
during the oscillation keep it in mind okay okay bat part that little you have to answer carefully find the time taken
to move from the lowest position to the displacement of 2 cm upwards so from the lowest position to 2 cm upwards uh how
long what's the time so I'll raise again and write only the B part again second the B part again I'll write it I did
space okay so the time taken to move from the lowest position to the displacement of 3 cm upwards okay so if
you draw the spring when the spring is at equilibrium position this is the equilibrium
position so it was pulled down through uh from the equilibrium position it it was pulled further down uh through 4 cm
so this is 2 cm so it's a to move upwards to through CM the static extension is four so the amplitude
downwards is the equum position amplitude downwards equal to 3
cm because it's pulled further down through 3 cm and released so what's the time taken to move from the lowest
position uh this position to have a displacement of 2 cm upwards okay so that means it's starting its motion from
the lowest position then we need to find the time taken to have a displacement upwards uh 2 cm so it's starting from
the lowest position initially it has the extreme position means later to find the displacement we need to use the equation
x = a COS Omega T So initially it was at the extreme position that is position where the amplitude happens uh later the
displac is upward Direction so if I take this downward Direction positive if I take the amplitude is 3 cm positive X
will be from the equilibrium position upwards it's going to be upwards x = 2 cm means it's going to be - 2 cm because
displacement is a vector quantity so downward Direction amplitude if I take positive upward Direction displacement 2
cm means it must be minus 2 keep it in mind that's going to be opposite direction to downward Direction upward
Direction opposite direction from the equum position so X I should put - 2 is equal to a 3 the amplitude is 3 because
it's pulled 3 cm from the equum position so 3 cos Omega that is 2 pi over we found the time period already we found
it uh time period we got it as uh 0.4 0.4 into T Sol it you will get time
that's the time answer calculator must spe radium mode when you solve it solve by using
calculator you'll get the time that's a time take to move from the lowest position where the amplitude is 3 to
displacement 2 cm upward Direction the minus sign comes because we took the downward amplitude positive means
displacement upwards it should be minus yeah the time is uh the time taken for this oscillation is
0.146 seconds or 15 seconds if you want to give it in two decimal points okay so the sixth question a mass
of 600 G is attached uh to a vertical spring and then it is displaced through 8 cm from
the equium posision so that means 8 cm is going to be the amplitude of oscillation from the equum if you pull
or push whatever it is through a particular distance and release that's going to be the amplitude so amplitude
is 8 cm during the oscillation maximum speed is 76 cm/s that means at the equilibrium position the speed is 76 cm/
second find the spring constant of the spring okay so we know the V Max and we know the amplitude so first part answer
we know that V Max is equal to a Omega and we know that Omega is = to 2 piun / T and also we know that t = 2 piun squ <
TK of M K okay substitute all these things V Max is equal to a Omega we can say 2 piun / t t = 2K M K means you
substitute that you will get a into otk of k / m okay so from this Vmax we know that uh
76 CM means 0.76 m/ second amplitude that's going to be 8 cm mean 0.08 I could have keep both
CM no problem both side will get cancel 100 doesn't matter I converted to meter into square root of K is the question
mass is uh 600 0.6 solve it and find the k that is K = 5415 Newton per met that's
right okay second part find the maximum acceleration so maximation means a Max equal Omega S A nothing you can find
simply do that so second part A Max
= Omega S A Omega = 2 pi/ p all x² into a so from this a Max equal 2 pi
over uh the time period we found it in the first part uh that is uh okay we have to find the time
period we'll find Omega first that's easy Omega = 2 piun / T it's given in the data sheet T = 2 piun of m/ K it's
given in the data sheet 2 Pi root of m/ K is given in the data sheet so if you substitute Omega T Omega 2i / T that is
2 piun of m/ K so it's going to be square root of k/ n that is Omega right so we substitute that in this equation a
maxal Omega S A we'll use that Omega S A so a Max is equal to Omega squ means k/
M Omega s means k/ M into a so K we found it in the previous part that is 54 1 5 mass is uh
0.60 amplitude 0.08 this much of me per second squar so already you'll get the
answer that is 7.21 so the third part find time taken to move from the highest position
highest position means the displacement from the equum position is the maximum means at a position where the
displacement is equal to amplitude which is 8 cm from the highest POS point to the displacement of 5 cm downward so
it's moving from if I consider if I show it on a block diagram if I say this is the equilibrium position this is the
equum position highest position somewhere here this is ude that is uh uh 8 cm from this position from here to a
displacement of downwards displacement of downwards which is 5
cm so initially here if I take tal 0 here if I take initially at this the time taken to move from here to here is
it so if I take tal 0 here how long will it take to move from here to here is the question so if I take from here to here
I'm going to consider the mo so t = 0 initially it is at the position maximum displacement at the highest position so
tal 0 if it is at the extreme position x = a COS Omega T so we can say x = a COS Omega T I should say I should use a is
the amplitude upward Direction so displacement downwards means it's going to be Min - 5 is equal to 8 both can be
centimeter even if I convert to meter they will get cancel so minus 5 because displac downwards amplitude upward which
is 8 so - 5 = 8 cos Omega Omega we found it in the previous question that is Omega = 2 Pi / t or you can say Omega
you can find it separately if you want Omega = sare root of k/ M you can find the Omega and substitute Omega and find
the time you'll get the final answer okay so the answer will be substitute we find Omega first that is
going to be square root of uh K we found it 5415 over
0.60 that's going to be uh 9.5 radian per seconds so here we'll say - 5 = 8 cos uh
9.5 T we need to find the time use the keep the calculator in radian mode and find it
time is 0 236
seconds okay so the last part find the speed of the mass when the displacement is 5 cm downward so that means at this
question but you found the time Tak to have 5 CM downward so when it comes to this position what is the speed that's a
question so same diagram I can use so this a fourth part I need to find the speed at this position so in the theory
I told that if the displacement is given by xal a COS Omega T the relevant speed equation Bal a Omega sin Omega T that
will be minus sign minus a Omega sin Omega T but when we speed the minus sign won't be there because we are dealing
with magnitude so the speed is given by if the displacement is given x a COS Omega we are using this displacement so
the relevant speed is so the relevant speed is if the displacement I'm using this equation so
the relevant speed is going to be a Omega sin Omega T the time I should substitute
0.236 seconds so V is equal to a Omega sin Omega T when I actually when I differentiate this there will be minus
sign but that minus sign we are not using because we are dealing with speed so a Omega a is
0.08 Omega we found it 9.5 s 9.5 into the time
0.236 so that's the speed at the position 5 cm when the displacement is 5 cm below the equilibrium position I gave
it in the notes if the x is given by xal a COS Omega T the relevant speed is a Omega sin Omega T the displacement we
are using x = a sin Omega T the speed will be a Omega cos Omega T if you solve you'll get
0.596 m/s uh that is 59.6 cm/ second uh those who are doing uh further maths M3 you
might thing why are we using this way can't we use b² = Omega s a² - x² but that is not in the syllabus that's the
reason I didn't use it but if you're using that equation so this is correct 59.6 but due to the approximations of
the uh this one uh it could be slightly different when I use the next method but don't do that method in the physics
paper because that equation is not given in your syllabus but anyway I'll show that uh this is one method this is the
way you have to do in physics you have to find the relevant time for that particular displacement then use the
equation for the speed you will get this answer 0.596 m/s or 9.6 cm/s but you can do this way also those who are doing
further Max M3 you know that there's another equation that relates the displacement and the uh speed that is uh
v² = Omega 2 into a² - x² but this equation is not in the syllabus but I'll show that Omega squ we found 9.5 s 0.08
s - 0.05 displac and solve it from here V you will get slightly different answer uh that you will get uh 0.593 earli I
got 596 this you get 0.593 m/ second that is uh 59.3 cm/ second early I got
59.6 slight different because of the time but I found I approximated but better don't do this method in physics
this equation is not given in your data sheet not used in physics okay so the theory related to
this type of question a spring uh trolley attached to two Springs and oscillating such that the spring is
always under tension I already did it see the time stamps are given so according to the time stamps go through
the video so uh there I derived the equation when a spring is attach sorry when a trolley or an object is attached
to Springs and I got the equation for the uh time period there I got the equation
tal 2 pi square root of m/ 2 K I told that m/ 2K if the spring constants are different K1 k then it will become M
over K1 + K2 how to derive it I already did it so I'm not doing it again so so see the video the time stamp is given
from the time stamp you can navigate to the relevant Theory okay so 2 pi square root of the asking to find the time uh
time period so m is 900 090 over 2 * spring Conant of each spring is 120 substitute you'll get the
answer 0.385 okay second part find the maximum speed same way V Max
equal a Omega Omega = 2 pi/ t Okay so the amplitude 4 cm 0.04 into 2 pi
over T is 0 385 this much of me per second
so that is 0.653 that's the maximum speed okay next topic is uh motion
graphs for simple harmonic motion so the motion graphs means uh displacement time graph you know displacement is always
measured from from the equilibrium point so displacement time graph velocity time graph and acceleration time graph these
are the three graphs uh uh related to simple harmonic motion I'm going to discuss now uh you know that
displacement is given in terms of either cos or S it's a c function or sign function we did questions also based on
that when you differentiate displacement with respect to time you'll get the velocity so if
the uh displacement uh is given uh in terms of x = a COS Omega T if you differentiate it differentiation is not
in your syllabus but you should remember if the displacement is given by x = a COS Omega T then the velocity will be
given by minus a Omega sin Omega T So this if it is cos it will become s anyway so displacement velocity both are
the similar shape but only there will be a face shift there'll be a face shift of 90° any same can say uh if the x is
given by x = a sin Omega T then the velocity will be given by a Omega cos Omega T acceleration is given by a is =
- Omega s x or you can differentiate this again either way we can AAL - Omega s x for X you can substitute this one or
you can differentiate this again you will get min - A Omega s cos Omega T same way here you'll get a is = to a
Omega 2 - A Omega s sin Omega t Okay so uh the exam what happened they give either displacement time graph and ask
you to draw the relevant velocity time graph and acceleration time graph or they can give velocity time graph and
can ask you to draw the relevant displacement time graph and acceleration time graph same way they can give Accel
time graph and ask you to draw the relevant uh both velocity time graph and displacement time graph so actually uh
when we teach we don't follow this s cos format the graph what they are going to give in the exam is a s or cosine shape
whatever it is with the different phase changes whatever it is but how to draw the other two graphs if they give for
example if they give a displacement typ graph how to draw the relevant velocity time graph and acceleration time graph
there's a small technique by shifting the y axis different teachers they teach in different way some teachers they uh
tell or they they teach by Shifting the graph towards left or right I normally teach by Shifting the Y AIS towards left
or right through tx4 I'll teach you now so that's a simple way remember the method so you can answer or you can draw
any graph when one of the graph is given so it's a very simple technique you need to uh remember Shifting the Y AIS
okay so this is the technique uh when displacement time graph is given XT graph is given and when they as to draw
the relevant velocity time graph shift the Y AIS of the given displacement time graph through T by4 towards right so
this Arrow indicates towards right so shift the Y AIS or the y- axis means the displacement uh axis display Y axis the
y axis of the graph shift it towards right through t by4 y AIS towards right this Arrow indicates
towards right through T by4 if you shift it towards right through T by4 you will get the relevant velocity time graph
whatever the displacement time it could start from zero or somewhere else wherever it starts we don't need to care
but when the displacement time graph is given and if they ask to draw the relevant velocity time graph shift the
YX is towards right through T by 4 that will be the velocity time graph I'll show you a graph now where displacement
time graph is given like this but displacement time graph is given like this any shape this is true
this is displacement time graph okay to get the velocity time graph uh shift the y axis towards right
that means if I show put the y axis here if I put the y axis here that will become velocity time
graph that means the displacement time graph is here that's starting from zero here if I shift the y axis of the
displacement time graph towards right through T by4 you know this is one time period half the time T by2 this is T by4
shift the y axis towards right through tx4 then this will be this graph will be the velocity time graph so normally they
ask you to draw it on the same axis so if you want to draw the same axis you can draw like this you can put the dot
dot line normally to make the draw the graph easily if you want you can draw separate then I'll draw the both way
draw down and how do they ask in the exam sometime they ask to draw it uh separate axis they give or sometime they
ask to draw it on the same axis if they ask to draw it on the same axis the given axis how to draw the velocity time
graph okay so I told you you had to shift it to the right velocity so that means if I shift it towards right the
relevant velocity time graph will start from the maximum here this is going to be the maximum velocity is going to be
maximum when the displacement is equal to zero so you should draw the velocity time graph like this so the velocity
time graph will be like this because different units because displacement is meter velocity time meter per second so
don't worry about the numerical value the magnitude of the Velocity I'm going to draw only the shape of it so when I
draw the shape of it it should start from the the zero it's not necessary to start at the same level you can draw it
even down or even up doesn't matter because I already told we are not considering the magnitude only the shape
we are going to consider so the graph should be somewhere like this that means it should be shifted y
AIS towards right you will get the shape this blue color graph is the relevant velocity time
graph if I shift the y- axis of the given black color that is the displacement time graph towards right
through PX4 the shape what I observe will be the velocity time graph so I started from the t = z so on the given
axis so it's going to be like this shape I can draw the same blue color graph separately down now I'll remove
this blue color graph that's the velocity time graph this is going to be the velocity time
graph can I'll draw it separately down okay before starting separately I'll draw all three graphs on the same
axis and then again I'll draw it separately so this is the given displacement time
graph so the blue color is the given uh the the what you drew the display sorry velocity time graph so ACC time graph
how to draw if you want to draw the acceleration time graph from the given velocity time graph again shift the y
axis of the Velocity time graph towards right y AIS shift it towards right through t
by4 t by 4 you will get the velocity time graph so if you're drawing the uh sorry acceleration time graph if you
want to draw the acceleration time graph from velocity time graph shift the Y AIS of the Velocity time graph towards right
through T by4 you'll get the accession time graph I'll show that or if you want to draw the ACC time graph directly from
the displacement time graph invert the graph just invert it about the time axis so you'll get the relevant acceleration
time graph invert the graph you will get the acceleration time graph so you'll see whether it's become inverted graph
when I shift the Y AIS of the Velocity time graph towards right through tx4 so I know the blue color graph is the
velocity time graph if I shift the Y AIS of the blue color graph towards right through T by4 I should draw the
acceleration axis here the acceleration axis should be drawn here if I draw the acceleration axis here that will be this
graph now what you see as a blue color graph will be the acction time graph so this is the red blue color is the
velocity time graph it's y AIS if you shift it towards right through T by4 whatever you shape you see it's starting
from zero when time equals z that is going to be the acceleration time graph so I'll draw the acceleration time graph
on the same axis if I draw it so that means this Y axis should be shifted to the right means I should start from here
I should start from here the acceleration time graph I'll draw the the Y vertical
line so the ACC time graph should be this shape here also I don't consider the magnitude
because different unit is me/ second square but I'm drawing only the shape so that the accession time gra will be like
this shape you can see the red color graph that is the acceleration time graph this
acceleration time graph and the displacement time graph are inverted graph when the displacement is maximum
acceleration is negative maximum when the displacement is negative maximum acceleration is positive maximum you can
see it's Inver graph that is going to be the acceleration time graph so I'll draw them separately uh one by one uh one
after other now okay so how to draw the velocity time graph and uh acction time graph for
this given displacement di graph shift the y axis towards right through T by4 so the velocity time graph should start
from here then it's a uh proper same similar shape sign or cosign shape so if you draw it start from Maximum it's
going to be like this the graph will be like this here the Gap is little increased it's
okay if we going to draw it on the board so that is going to be the uh velocity time graph so acceleration time
graph you can invert the displacement time graph about X so this will come down this will go up this will come down
or shift the Y AIS of the Velocity time graph towards right through T by it should start like this it should start
like this you can see inverted graph of the displacement time graph is the
acceleration time graph okay so how to draw the other way if the uh displacement uh velocity time
graph is given how to draw the displacement time graph shift the Y Y axis towards left if you shift the y
axis towards left through tx4 you will see if I shift it towards T by4 this maximum should become zero here so that
will be the relevant displacement can start see it's starting from zero see starting from zero so it's easy to
remember to sketch the displacement time graph from velocity time graph shift the YX y axxis of the Velocity time graph
towards left through T by4 same way to draw the velocity time graph from acceleration time graph shift the y-axis
of the acceleration time graph towards left through tx4 so you can see if I shift the oxygen time graph it's Y axis
towards left through T by4 So through t by4 means it should be shifted somewhere here if I shifted towards here this
graph will be extended to this way so you'll get the display starting from here you can see that is the velocity
time graph to draw the velocity time graph from acceleration time graph shift Y axis this is the acceleration diagram
shift the y axis towards left through T by4 the graph will start like this you can see starting like this uh so easily
remember you can to draw from the acceleration time graph if you want to draw the velocity time graph shift the Y
AIS towards left through tx4 1/4 of the period you will get the velocity time graph to
draw the displacement time graph from the velocity time graph again shift the y- AIS of the Velocity time graph
towards left through T by4 you will get the displacement time graph to get the
displacement time graph from the acceleration time graph again invert the graph invert about the time axis invert
the acceleration time gra you can see if invert ACC time gra goes up goes down goes up you'll get the relevant
displacement time graph okay we'll do a question relat to this okay so the question is velocity
time graph is given you need to draw the relevant displacement time graph and acceleration time graph for this given
velocity time graph of a simple harmonic motion okay we'll start first we'll draw a displacement time graph so what should
we do to draw or sketch the displacement time graph from velocity time graph shift the Y AIS of the velocity time
graph towards left through T by4 and see what could be the shape if I shift the Y AIS of velocity time graph towards left
through T by4 and if I imagine if the graph is continued towards left through T by4 the shape will be like this so my
graph will start from the negative maximum then I'll proceed the similar shape beyond that so the graph is going
to be start from here so the graph will be this will be the relevant displacement
time graph for the given uh velocity time dra same level I should draw start here okay drawing on the board with
difficult it's okay but this is the shape uh you should draw for the given displ velocity time graph this is the
displacement time graph okay how to draw the acceleration time graph for this given velocity time
graph so that the accession time graph I need to draw from the velocity time graph given
velocity time graph means shift the y- axis towards right through T by4 you'll get the Accel time graph or you have
already drawn the displacement time graph invert invert the displacement time graph about the time axis you'll
get the acceleration time graph either way you can uh draw the acceleration time graph so if I for example I check
both methods if I shift the Y AIS of the veloc vity time graph towards right through T by4 I'll start here if I shift
it towards right so if the y axis of the Velocity time graph shifted to the right means here the y- axis should come so
the ACC time graph should start from the maximum so it should start from here or invert the displacement time graph about
the time axis here also this will start from here so I know the shape so it could it's going to be this shape
difficult to draw a sign shape on the board but anyway this is the shape you expected
shape for the acceleration time graph okay I hope you can answer or you can draw any uh two when one of the displ uh
one of the motion graph or HM simple harmonic motion is given okay it's an experiment how to
measure the gravitational acceleration G by using simple pendulum so there you need to have a simple pendulum with
variable uh length that means the length of the string attach a small Bob is called Simple pendulum normally we
attach it on a RoR stand and keep a ruler behind it uh it's like this uh you can have a setup with a RoR stand
there you can have a ruler behind it so you have to hang it h the symbol
pendum so I'm not drawing everything set up uh difficult to draw but idea we keep a ruler with a set Square to measure the
length of the string I'll just draw only the block diagram so if I draw this easy to draw the block diagram so uh there
must be a ruler to to measure the length and there must be a pointer to show the equili you can use even a a pin
attached to a RoR stand as a pointer when it is at rest then the length must be measured by using uh a ruler with a
set Square uh the length of the string L it should be allowed to move oscillate through small angle because the equation
what we learned tal 2 pi Ro l g is valid only for small oscillations because I showed the derivation there we are
taking sin Theta = Theta that's true only when the angle is smaller somewhere less than 10° then only sin Theta will
be equal to T time radians by using that only we got that equation tal 2 pi l g okay so let it oscillate through smaller
angle and for a given length measure the time taken for 10 oscillations then repeat The Experiment
three times for the same length measure the total time taken for 10 oscillations so find the average time
for 10 oscillations by using the three different measurements taken for 10 oscillations then divide the average
time by 10 you will get the time period of oscillation for the first length L1 so you can tabulate it tabulate simple
experiment it won't take much time and do it in the laboratory at school so you need to vary the length L time per
period for 10 oscillation so there you can have T1 T2 T3 then average time T
average divide that average time by 10 you will get uh T you can measure for 15 that's will be more accurate when you
measure for 15 larger time smaller uh percentage on 1 so measure the the time for 15 oscillations T1 T2 T3 and find
the average time of those three readings then T average divided by 15 gives the time period so do it for different
length you can start from 1 M or depending on the retor stand that you have the height and we take at least uh
10 different readings 10 different readings for different lengths and find the relevant time period of oscillation
for each length as I already showed how to take the uh average time period okay so we have the equation T = 2 piun of L
/ G that is t² after you plot the graph I will tell
you t² = 4² L we are going to plot a graph that is t² is = 4 < 2 / g into K okay so you
are going to plot a graph of length against t² t² t² you get it from the time period and you square it you can
have the t s so if you want you can have a separate column for t² also right so you are to plot a graph of t² against uh
length l so it's in the form of Y is = to MX so you'll get a graph straight line
through the origin this is L this is t² the graph will be a straight line through the origin draw
the best line find the gradient of the graph so the gradient of the graph find it from
it by take two clear points and find the gradient uh then gradient M isal to
4i 2 / G so G will be equal to 4 pi^ 2/ radiant that will be the gravitational acceleration this T Strat sorry T
Strat okay so the next topic is energy transfers during oscillation in uh simple harmonic motion we are leing we
are learning about simple harmonic motion so energy transfer what type of energy transfer occurs uh during
oscillation of uh simple pendulum first we'll think that way okay so it's actually nothing already you learned
this uh related to this in unit one also a simple pendular means a string which has a length L carries a small B the
mass we don't consider because per of oscillation T = 2 piun of L / G given in the data she equation sheet and this
equation is valid only when the angle Theta is very small very small means when Theta less than here we can say the
Theta less than almost 9° or 10° we can say approximately where sin Theta = to Theta in radian so we need to get that
relationship sin Theta Theta and radians when we are deriving this equation I already derived see that that's the
reason we say this equation is valid only for small oscillations okay so for small oscillation when the bul of mass m
moves from this time period does not depend on the mass when it moves from this position to this position what type
of energy changes occurs the energy changes occurs it's losing the height or its height is decreasing so that means
loss in GP so loss in GP means if I consider the initial height when it has a maximum displacement so it's going to
be the amplitude so this is going to be the amplitude this is the amplitude so when the B moves from here to here loss
in GP is equal to gain in kinetic energy so this is the maximum height we can say h so loss in
GP gravitational potential energy equal to gain in kinetic energy loss GP means M GH is equal to g g half M V Max squ
because at the lowest position the speed is the maximum that is going to be the equilibrium position when the simple
penum is not oscillating it will be at rest at this position so this is the equilibrium position where the speed is
the maximum so half MV Max s minus if you release it from rest initial speed is uh 0 half M u² Okay so all the masses
will get cancelled so since angle is Theta is very small we can see the amplitude this amplitude and
this the length of the segment is almost equal to same we know that in a circle when you consider the circle imagine a
circle like this in a a small like a circle when it C A Small Change in angle Theta when
this Theta is very very small the length of this Arc the length of this Ark and if you draw a line between these two
points both will be almost same so here we can say when Theta = less than 10 approximately the amplitude a is equal
to l Theta we can say this the length of the string is L so L Theta is actually the length of the Ark but we can see the
amplitude is almost equal to length of the uh sorry L Theta Theta in radius we can do that approximation for small
angle so lossing GP m g equal to gaining half V maxus half M u² I already told that V maxal to a Omega V Max is equal
to a Omega we can use here also for any simple pendular that equation is valid maximum speed occurs at the equum
position V Max equal a Omega and we know that Omega equal 2 Pi / t or 2 pi F all these can be used for even uh symbol
pendum so this is the only change in energy loss in gpal gaining K same way if it move from this position to the
other side maximum position somewhere it goes here also we can say loss in ktic energy equal gain in GP the height it
moves up is the H gain in GP that is the height we need to consider that's all related to simple Tulum energy transfer
okay a question related to energy change in simple pendulum uh simple pendulum of length 10 m is pulled to a side through
an angle of 90° so angle of 90 we can take a smaller angle uh so this is 90° uh from the equilibrium position so
this is the equilibrium position the length is 10 m the length of the symbol pendulum is 10 m
uh and then released during its oscillation find the maximum height that the bul reaches above the equ anyway
it's going to oscillate uh again and again so we assume U there's no energy loss due to work done against drag Force
so if you release it from according to the law of conservation of energy if you release it from a height H above the
lowest position it will go to the same height in this side also so any I can consider the initial height or the
height to which it moves to the other side uh we can say that height the vertical height it moves up H is it we
are going to consider that vertical height it moves up is H okay so there this is the vertical height it moves up
above the equilibrium position so that's the thing I need to find that's will be same as the initial
height H because uh according to law of conservation of energy from what which height I release it will reach to the
other side also the same right okay so U here we know the speed is maximum at the equilibrium position we know the
equilibrium position is the lowest point there the speed is maximum so we'll take that speed V
Max so it's released from rest means initial speed is zero okay so here I know that I already
told if the angle is small 9° I can imagine the amplitude is this one you know that if I connect these two
Center to C of the B that's going to be the amplitude so this is the amplitude so this is the amplitude Okay
so the amplitude is almost equal to the length of the segment this one so we can say amplitude a and the length of the
segment of this small circular part is same both are same so uh the amplitude a we can take a isal to L Theta a isal to
L Theta we Theta is in radi so we can find the amplitude in that way so the uh amplitude is going to be L uh
10 m that's the length of the r that's a l the length of the string which is 10 m Theta radians we need to convert 9° into
radians means you know 180° is pi radians so < over 180 into 9 so that will become uh 1.57 M so the amplitude
is 1.57 M okay so actually it's not exactly the same approximately we can say
approximately uh we can say the amplitude is 1.5 uh M there's no other way of finding
the amplitude here okay small angle no we can take that way right okay so when it is released from here here there will
be the maximum speed B Max equal a Omega we know that V Max equal a Omega Omega = to 2 Pi / T also we know
that t is equal 2 piun of L / G when the angle of oscillation is small here 90° we can say for 9° sin 9° in radians is
equal to sin Theta check it you'll get almost the same answer so sin Theta Theta radians valid for 9° also so that
is 2 piun into < TK of l 10 m/ 9 9.81 we can find the period of oscillation so the period of oscillation
will be equal to 6.34 seconds 6.34 seconds okay so we know the period Omega = 2 pi so V Max is equal
to a Omega a into Omega 2 Pi / T will substitute what could be the maximum speed at the lowest position so
amplitude we found it 1.57 into 2 pi over time period I found is
6.34 Sol you'll get the maximum speed that is at the lowest point so that will be
1.56 m/s okay the question is what height will it reach maximum height so this the maximum height they want to
find it or the height that could reach on the other side so we can say that it move from here to here loss in kinetic
energy Los in kinetic energy equal to gain in gravitational potential
energy okay so loss in ktic energy half Mass not given anyway it's going to get cancell half Mass into V Max Square I'm
consider the motion from lowest to the equilibrium position to the maximum position height so V
Max half M V Max squ minus there the is zero because speed becomes Z is equal to
mg I need to find the h m m will get cancel so half into B Max is 1.56 s is equal to
9.81 into H find the H or H Max whatever it is you will get the answer that will be
0.124 M that is 12.4 CM that's the final answer
okay next we'll analyze what type of energy changes occurs during spring Mass system oscillation of spring Mass system
so there uh firstly we think about horizontal illation where an object I took it like a trolley or it could be a
small sphere it should move on a frictionless Surface okay a trolley of mass m is attached to a spring which has
spring constant K so when it is when the system is at rest the spring will be uh at its natural length no compression no
extension uh the trol will be at the equilibrium position O then the trolley is pulled towards right through a
distance and release I already told that if you pull your trolley through 10 cm and then release during the oscillation
10 cm will become amplitude so you are moving it through you are pulling the spring towards right through a
particular length and release that length will be the amplitude from which uh the distance through which you pull
the trolley from the equilibrium position so that's going to be the amplitude so we'll think what will
happen when it moves from P to Q we imagine a point Q here where the displacement is X I'll mark that the
displacement is X because when the spring is in horizontal position the displacement and the uh extension will
be the same because the spring is at its natural length no force is is acting on the spring because the trolley is at
rest the spring is at its natural length so no Force so when the when you think about the position Q
where the displacement is X so the extension of the spring also X so we'll see what could be the relationship in
terms of energy when the trolley moves from P to Q so there's no change in its height it's moving on a horizontal uh
table or horizontal surface so no change in gravitational potential energy so the only the change happens is uh kinetic
ener between kinetic energy and the elastic potential energy what you learned in unit one elastic potential is
given by half K Delta x² Delta X is extension of compression Delta x² or half F Delta X but here we are going to
use this is easy to use half K Delta x² so when the trolley moves from uh P to Q for the motion from P to Q
P to Q when we consider loss in elastic potential ener because its uh extension is highest at P so there will be large
amount of elastic potential energ stored in it when it moves from P to Q the extens is going to decrease so lossing
elastic potential energy is equal to gain in kinetic energy so that that means half K
a² - half K x² this is the extension at Q This is extension at P which is amplitude is equal to gain in kerg half
M v² minus half M u² if the spring uh if the trolley come backs to O that's the equilibrium position the speed will be
the maximum where uh then X will become zero uh if the trol is Rel from P from rest so U will become equal to Zer
General equation so I didn't put substitute a value u0 but if it is pulled and released certainly initial
speed is going to be zero there we'll do a question later to this type okay so this is the question
related to horizontal oscillation of a spring Mass system so there the diagram is given mass of the trolley is 500 G uh
the 5 is not mass of the trolley is 500 G uh and the spring constant is 60 Newton per me uh trolley is pulled
through 10 cm from the equilibrium position and then release find the speed of the trolley when the displacement is
4 cm so you might think can't we use any other equation other than energy there is an equation but we don't have that in
at Exel syllabus that is we can find V ² = a² into Omega s minus v² sorry we can find this equation by by using uh v² is
= Omega 2 into a² - x² we can use but uh this equation we don't use in an Excel syllabus so the only way to find the
speed by using energy equation in your syllabus but we can use that equation also but not in the syllabus so I don't
want to use it you you might use it in uh forther mechanics but not in uh physics we don't use
that so we'll consider the motion from uh P to Q where Q the uh displacement is uh 4 cm first part 4 cm displacement 4
cm means extension also 4 cm uh when we consider horizontal oscillation so consider motion
from uh P to Q we Q the displacement is 4 cm we'll mark it here from here to here uh 4 cm
yeah 4 cm right so we consider the motion from P to Q so they are lossing elastic
potential energy I'm answering the first part there second part here Los in elastic
potential enery equal to gain in kinetic energy okay so uh this point I name it Q
right okay so uh loss in elastic po half you know elastic half K Del Del x² so initially the extension is equal to the
displacement which is amplitude half K a² because displacement is equal to amplitude we are releasing from the
point we are extended half k a s- half K X1 s this is the extension at Q This is the extension at a which is amplitude
which is at P amplitude equal to half M v² - half m u 2 U is zero because it's released from the
maximum displacement position so half all the half will get cancelled so K is given 60 yeah
60 * a² 10 cm 0.1 s minus UH 60 into 0.04 s that's the extension at Q that's the displacement also the same the
question is about find the speed when the displacement is 4 cm means that's the extension is equal to half Mass is5
0.5 v² - 0 solve it you will get V is equal to 1.0 m per second that's the answer for
first part okay second part find the maximum speed and hence find the period of
oscillation we can find the period of oscillation by using T = 2 piun of M K that's given in the equation
sheet but here the question is uh find the maximum speed and hence so don't use this one because they ask you to find
the maximum speed and by using the maximum speed find the per ofation we can find it not an issue okay so second
part I'll use the same equation nothing so I'll put the number two here motion from from P to O now P to O from the up
to equilibrium position same energy equation same energy equation General equation is the same but the speed is
going to be maximum because P2 o P2 o o is the equum position means that is the maximum speed we know that the speed
will be maximum at the equum position minus half M u² but U is zero so I'll say half MK X2 s anyway extension is
going to be zero at equilibrium position here the spring will return to its natural length Okay so we'll use it half
time the second part half K 60 * a² is 0.1 s minus the extension becomes zero so no elastic potential energy is equal
to half the mass is 0.5 V Max SAR minus 0 because initial energy kinetic energy is 0 find the V Max from here find the
Vmax you'll get V Max is equal to 1.10 m/s we'll get the maximum speed at the equilibrium position
1.10 but we know that V Max is equal to a Omega that is Omega = to 2 pi over T we
know that Omega = to 2 Pi / T so here the amplitude is the distance from eqution through what distance we are
pulling and releasing that's going to be the amplitude here the 10 cm is the amplitude so we know the Max 1.10 equal
a is 0.10 in M Omega 2 pi T find the T that's the answer period of oscillation so
that's going to be 0.57 seconds you'll get the same answer when you use T = 2 pi m/ k m is .5 K is 60
you'll get exactly the same answer nothing different but I didn't do that way because the question is restricted
say find the maximum speed and H so I follow that meod okay so again we are analyzing uh
energy spring Mass system how energy changes occurs during oscillation of vertical oscillation vertical spring
Mass system so when we hang a spring initially the spring will have natural length when no mass is added to it when
you add a mass it will extend and it will be at rest at the equilibrium position so this is going to be the
equilibrium position where it comes to rest this is called Static extension from the equilibrium position uh from
the natural L uh the extension occurs up to the static extension we call this is static extension normally we can use uh
x uh one we can put X1 here that is the static extension uh some books they use symbol e for static extension but anyway
I use X1 that is the static extension the mass is just attached and released so it reaches the equilibrium position
and it will be at rest so this is going to be the equilibrium position so that at equilibrium position
the weight of the attached mass will be balanced by the tension so tension is uh kx1 is equal to
mg at the equilibrium position okay from the equum position if you pull the mass through a distance for example 10 cm and
release it will oscillate about the equilibrium position the 10 cm through from theion through what distance I pull
it and release that's going to be the amplitude so if the mass is pulled further down so I'll draw the diagram
again for that situation so it's going to be like this right so it's pulled further down
through an amplitude a so this the equium position is the same so the amplitude is this one this
is the amplitude so when the mass is released from here it's going to move up what
type of energy changes could have occur so when it moves from the lowest position to equilibrium position the
height is increasing so it's gaining gravity AAL potential energy you know this is the equilibrium position so the
spe will be maximum here it's released from rest so kinetic energy also going to increase but the extension of the
spring here is X1 here the extension is a + X1 is the extension so the elastic potential energy at the lowest position
is equal to half K A + X1 s but here the elastic potentialy is half K X1 s this is larger than and this so it moves from
the lowest position P to equilibrium position o what happens it will lose its elastic potential energy so what could
be the energy equation that could be related what are the energy changes occurs when it moves from the lowest
position to equilibrium position for the motion from P to O [Music]
losing elastic potential energy equal to height is increasing gain in gravitational potential energy
because height is increasing also the speed is here Zero release from rest here the maximum speed equum position
plus gaining kinetic energy so that's a law of conservation of energy I'm using it something is lost is equal to Total
gain you can't create or destroy energy energy which is lost cannot be destroyed energy cannot be created to gain these
things whatever loss will be gain in different format so energy equation we need to consider loss in elastic po
equal to gain in gravitational potential energy plus gain in kinetic energy okay so normally in this
situation we take the amplitude less than or equal to the static extension X1 that's the way the
questions comes because otherwise the spring could compress when the spring is compressed we don't know how much it is
it could be compressed so when the spring is compressed sometimes the turn the turns of the Springs might hit each
other and the oscillation might be lost So to avoid that type of problems we normally take amplitude is less than
this amplitude is less than the static extension of the spring so that means if the static extension is 10 cm amplitude
will be less than 10 cm we we will pull it from the AC verion the distance we pull from theion will be smaller than
than the static extension and then we release okay if it moves from o to a point Q which is smaller than the static
extension which is Q what energy equation uh we can write or what type of energy changes occurs when it moves from
o to Q what's happening when it moves from o to Q what is happening the extension is decreasing further is it
because at this position extension is X1 so the elastic PO is high kx1 s but when it moves from o to Q the
extension of the spring is decreasing so it's losing the elastic potential energy and we know that maximum speed occurs at
the equ position so when it moves above o towards Q the speed also going to decrease so it's going to lose the
kinetic energy also but the height is increasing gaining gravitational potential energy so when it moves from o
to Q we can see Los in elastic potential energy plus loss in kinetic energy both are lost means
they are not destroyed they are lost and they'll be converted into gaining uh gravitational potential
energy so whenever you get questions later this you have to find out what type of energy is lost which energies
are lost which are gained you have to identify then substitute you will get a correct answer okay we'll do a question
based on uh oscillation uh of vertical spring we'll do a question on that okay so next question question
number 10 this question is based on vertical oscillation of a spring light spring why do we say light spring means
otherwise if the spring has mass every turn will have mass we need to consider their kinetic energy also to avoid those
problems we say light spring but light spring is suspended from a rigid support and it's free and carries a mass of 0.4
kg which produces a static extension of 6 cm in the spring the mass is pulled further down through 5 cm from the
equilibrium position and then released find the maximum speed of the mass okay the spring constant is not given we can
find it by using static extension okay so there we can find the static by using the static extension we can find the uh
spring constant of the spring okay if I draw the diagram first part initially the spring I already drew it in explain
initially the spring has natural length so at the equilibrium position I'll draw from the equum
position so this is the equilibrium position at which there will be static if I say natural length of the spring is
this much this is the natural length so this is going to be the static extension static extension is uh 6 cm so that is 6
cm static extension this is the equum position so at equilibrium position we can see mg is equal to K X1
we X1 is the static extension Mass which is attached we know that that is uh uh 0.4 kg so 0.4 into
9.81 is = to K into 0.06 find the K that will be the spring constant so there you will get K is
equal to 65.4 Newton per meter then what happened the mass is pulled further down so it's
mass is pulled up to here maybe it's we could have pulled further down up to here to a distance of 5
cm and release so this the um static 5 cm is pulled further down through 5 cm and release
the question is find the maximum speed we know that maximum speed occurs at the equilibrium position so if I name the
equilibrium position o if I name the equilibrium position o this position P so we need to consider the motion from P
to O at P the uh when it is at P the extension is 11 cm because 6 + 5 11 cm the displacement is
5 cm that will be the amplitude because it's pulled through 5 cm and release means it will oscillate in SLE harmonic
motion with amplitude 5 cm so we'll consider the motion from P to O when we consider the motion from P to O we can
use lossing elastic potential energy equal to gaining gravitational po IAL energy plus gain in kinetic energy so
still I'm doing the first part so for the motion from P to o p is the lowest position o
is the equilibrium position lossing elastic potential energy plus sorry Los in elastic poal equal to
gaining kinetic energy because is going to increase plus gain in
GP okay L elastic pH half P the extension at the lowest position is 6 + 5 that is uh 11 cm so
it's going to be uh half K we already found it so we substitute half K x² so k we found it that is uh
65.4 into 11 6 + 5 is the total extension so 11 cm means meter 0.11 0.11 s minus when it comes back to
equilibrium position so I'll write again the whole thing easy then I'll come back to uh I substitute it so half K
amplitude this is the amp ude plus X1 a + X1 is the X1 is the uh static extension half K A + X1 all x² minus at
this position it has only the static extension half K X1 s this is the loss in elastic potential energ it moves from
P to O gain in kinetic energy half m v ma squ because equilibrium position we are finding half m v Ma x s minus
initially the speed here is zero because it released so zero I can say plus gaining GP mg the height it
moveed from lowest position to uh equum position is going to be amplitude is moving through a height which is equal
to amplitude mg here okay we'll substitute the values so this is
half * 65.4 * a + X1 so that is going to be Lev that is 0.11 or I can say
0.05 that's the amplitude 0.05 + 0.06 alling s - half
65.4 into X1 is 0.06 squar is equal to half into the mass is U 0.4
V Max S Plus MGH mass is 0.4
9.81 into the amplitude 0.05 okay there are a lot of numbers carefully solve it you will get
everything we know except Vmax we need to find the Vmax Sol it you'll get V Max is equal
to uh 0.639 m per second okay so that's a we Max we found
it next we need to find the second part hence find the period of oscillation so hence we can find the period of
oscillation by using tal 2 pi M okay but the question is hence find the period of oscillation so V Max we know that so
I'll raise this V Max is equal to a Omega Omega = 2 Pi / T from that we can find the uh period of
oscillation okay second part V Max is = to a Omega at the same time Omega = 2 pi over T So V Max we
know that 0.639 equal amplitude of ill is 0.05 Omega 2 Pi / T find the T the time
period of oscillation uh you will get 0.49 seconds we use T = 2K s m k also you'll
get the same answer okay third part find the speed of the mass when the displacement is 3 cm
upwards okay for that we'll uh imagine the equilibrium position so this is the equilibrium
position at which it carries the mass so we found the speed at the equilibrium position 0 point uh we found 0.639 m/s
that's the maximum speed so this is the natural length so this is the eum position so
when it is at the eum position it static extension is uh it's uh 6 cm so the static extension is 6
cm that is X1 now it's moving from here the speed we know 0.639 we found it the question
is find the speed when the displacement become upward so when it comes to this position when the displacement X becomes
3 cm so when it comes to 3 cm what is the speit here we know the V Max at this position we know the Vmax we found it
already okay so this is the equ we call named O So this position Let It Be Q when the
displacement become 3 cm upwards name that position Q okay we can use the equation uh for the motion from o to Q
so third part for the motion from o that is the equilibrium
position to Q which is upwards above the equum position so when it moves from o to Q the extension is going to decrease
so it's going to lose elastic potential energy also we know the speed is maximum at the equum goes up the speed will
decrease so it's going lose kinetic energy also at the same time it's going to gain
gravitational potential because the height is increasing so for the motion from o to Q we can say Los
in elastic potential energy plus lossing kinetic energy is equal to gaining gravitational potential energy
losing elastic po what's the elastic potential energy at the equilibrium position so the elastic po at the
equilibrium position uh is equal to half k at the equilibrium it's going to be just only the static EXT half K X1
s - half K X1 that is the static ex X1 is the extension at the equum position the
extension is going to decreased by X which is 3 cm of K X1 s that's the extension here yeah half K X1 squ is the
elastic Port here here I need this uh extension that is X1 - x X1 - X all in squ plus loss in ktic energy here the
initial ktic energy half M V Max s - half M V1 s B1 is the speed at Q the speed at Q is V1 it be V1 at this
position the speed of the m is V1 here is equal to gaining GP m g the height through which it's going to move
from here to here here is X mgx you right and substitute you'll get the correct answer check it again losing
lastic poy at this position elastic po half K X1 s just the static equation at this position what is the elastic poti
energy stored in it stored in because careful here we can't write some students have wrong idea lost in elastic
po means half KX Square no because uh since it's a square a minus B all things squared is equal a s minus B sare so
carefully you have to follow initial potential energy minus final potential energy that is the loss in potential
initial energy minus final energy is the loss in elastic potential energy so here the elastic poti half k x 1 - X1 is the
This One X is the distance it moves so the extension at this position is X1 - x is the extension so X1 - x is the
extension when it is at position okay half b max squ that's initial kery final K energy that's also loss in kerg
mgx X is the height which through which it's moving from here to here okay uh so that's going to be half K
65.4 into X1 2 that is 0.06 s - half into 65.4 uh into X1 - x X1 is 6 cm
0.06 - 0.03 squ plus half MV Max s half into mass is
0.4 Vmax we found it that is 0.639 s - 12 into 0.4 into V1 2 okay so that's a V in K energy is equal to M GX mass is
0.4 into 9.81 into X is the height to which it move is
0.03 solve it you'll get the V1 carefully Solve IT lot of numbers okay so V1 is equal
to 0.511 m per second okay
okay the common mistake is uh this part that means finding the loss in elastic potenti energy uh say in case this is
0.3 I told but anyway in case if the third part find the speed of the mass when the displacement is for example 4
cm upwards in case if it is all 4 cm upwards then it should be half K 0.06 s that is the elastic potential energy
initially I'm considering the motion from o to Q so is the initial Point Q is the final point the elastic potential
initially is half K 0.06 s elastic potential finally when it is at Q what is the elastic potential means that is
depending on the amount of extension so the extension this is the extension when it is at that position so that is 6 cmus
4 cm just change the question in case if there's a question like 4 cm means the extension will be 2 cm the extension is
going to be 2 cm Delta X I can say Delta X = to 2 cm so that means you will get it half
K half K the extension that is 2 cm so it should be half into 65.4 into 0.02 s is the energy stored on
it when it is at Q so this would be 0.06 minus 0.04 s that is the elastic potential
loss so this initial elastic potential enery minus final elastic potential energy uh it's a very common mistak they
makes in case if it is like moving from the lowest position to q and if the uh extension decreases by 4 cm they just
put Los elastic potential energy equal to half okay loss in extension that is wrong loss in extension square is wrong
because initial poten elastic potential minus final atic poti energy that gives the losing atic po energy never gives
half loss in extension alling Square won't give the loss in elastic poten careful it's a very common mistake
friends make normally okay so the next topic is natural frequency what do you mean by
natural frequency now uh when you allow a system to oscillate in its own without any external
interference then it will oscillate at the frequency called natural frequency where system is allowed to oscillate in
its own freely the frequency at which it oscillates is called natural frequency when system is allowed to oscillate
freely the frequency at which it oscillates is called natural fre fre cancy for example we know that frequency
and period of oscillation are related by f = 1 / T already we know that for a simple pendulum the period is given by T
= 2 piun of L / G so this the period of oscillation when the symol pendulum oscillates freely without any external
uh force or external interference just you pull the pop and leave it through small angle of oscillation this is the
period of oscillation so the natural frequency normally denoted by F not that's a general notation we use so f is
equal to 1 / T that is 1 / T So for simple pendulum the natural frequency is equal to 1 / t means 1 / 2 piun s < TK
of G / L same way for a string Mass system the period of oscillation given in the data sheet 2 piun of m/ K so the
natural frequency F again 1 / T so that will be 1 / 2 piun < TK of k/ M this is the natural frequency of string Mass
system okay what is forced oscillation forced oscillation means forcing an oscillator oscillator means system of
system that can oscillate is called oscillator forcing an oscillator to vibr or oscillate according to frequency of
an external vibrator is called forced oscillation forcing an oscillator or forcing a system to oscillate according
to the frequency of external vibrator or external system is called uh forced oscillation for example you can have at
in the laboratory we create uh forced oscillation by connecting a spring Mass system a spring Mass
system if you let it oscillate it frequency the natural frequency equal I just wrote it f = 1 2K root of K orm but
if you connect this spring Mass system to an electrical vibrator so electrical vibrator which has variable frequency of
oscillation that we can obtain by using a signal generator say for example if signal
generator you know there it's a uh AC output it's a AC generator ac voltage but the frequency could be changed so if
the frequency of the AC output of the signal generator for example 20 HZ the electrical vibrator will vibrate up and
down this electrical vibrator will vibrate at 20 HZ so the spring Mass system also will vibrate at 20 hers the
same frequency as the electrical vibrator it will vibrate now you change the output of the signal generator to 40
HZ so the electrical vibrator will vibrate at 40 HZ so the spring Mass system also will be forced to vibrate at
40 HZ this is called example for forced oscillation but naturally that happens when your car pass over bumps you know
the mirror everything they vibrate according to the frequency of the wheels at which they are passing over the bumps
or maybe due to the vibration of the engine of the car the mirror can vibrate or during earthquake the buildings are
forced to oscillate at the frequency of the trimor during washing machine also uh at this fre due to the depending on
the frequency of rotation of the drum the washing machine will be forced to vibrate at the same frequency these all
are the examples of forced oscillation so the forc oscillation Means A system that can oscillate in its own freely
also but it is forced to oscillate according to the frequency of external vibrator this type of oscillation called
fored oscillation remember that during forc oscillation The Driven system for example this is the driven system spring
M system is the driven system or your car in the car I told the mirror can vibrate at the frequency of the engine
so mirror system the mirror the arm everything together it's a driven system uh same way a washing machine is the
driven system it's forced to oscillate at the frequency of the rotation of the drum so during forced oscillation the
driven system will always oscillate or vibrate at the frequency of the driver this is called driver the frequency of
the electrical vibrator that's called frequency of the driver so always remember that frequency of the driven
system will be equal to frequency of the driver that you must know that the next topic is resonance what is resonance
okay that is something later for oscillation resonance happens during for oscillation so I told that uh
we can force an oscillator according to the frequency of external vibrator but when the frequency
of the external vibrator becomes equal to natural frequency of the driven system what happens actually so for
example think about simple example a swing or maybe a mass attached to uh say it's like a simple pendulum it has
natural frequency uh the time period T = to 2 piun of L / G so imagine if you pull this pend the B to here some
position here a small angle and you are leaving it so the time taken by this B we assume the there's no energy loss due
to drag Force so the time period taken by the Bob to move from here to here then to come back is T = 2 pi Ro of L G
now when it comes back to this position the time taking is this amount you are applying a force to it just mean you are
giving a push that means you are transferring energy to it we are doing work on it small work is done when the
say for example you just pull the B and release it it's moving now it's coming back the time taken is this one so when
it comes back you are just giving a small push to it you are doing a small work you are transferring a small amount
of energy to it what happened now it's getting energy so it will go further more amplitude it'll move with larger
amplitude but this equation does not depend in amplitude if the oscillation is within 10° small oscillation now it
has gain energy so it's moving with large amplitude to come back again from the moment you give a small energy
transfer from that moment to come back it take same time again because this time period does not depend on the
amplitude so when it comes back again you you are giving additional energy it will move with further extension or
further amplitude it the amplitude will increase further that means every time when it comes back you give energy so
the time interval you are taking to transfer energy is equal to time period of
oscillation time period at which you are transferring energy to the system the uh symbol pendulum is same as the time
period of illation of the simple pendulum so the energy is transferred at the same period as the time period of
oscillation means the frequency at which you are transferring energy is same as the natural frequency of the uh
oscillation of the system so what's happening here you are transfering energy at the frequency which is equal
to actual frequency of the system is we are forcing it to oscillate at your frequency by transferring energy the
frequency at which you are transferring energy same as the natural frequency of uh simple pendulum or the system means
You observe that the amplitude is increasing why the energy is transferred more efficiently I can use
that word energy is transferred more efficiently when the frequency at which you transfer energy becomes equal to
natural frequency of the simple pendular I hope you understood so for example if you change the frequency at which you
transer for example you are trying to give it more faster more quicker right so imagine this Bob is moving and coming
back somewhere when it is here you are trying to give the energy sometimes you then when the Bob is on the way it's
moving here it has kinetic energy this direction is it hasn't reach the maximum amplitude per so the B is somewhere here
still moving this way you are just pushing it same as earlier what you need here then the B might stop the
oscillation might be disturbed so there the energy transfer is not efficient the amplitude might decrease okay so to have
a good increase in amplitude the time period at which you are transferring energy must be same as the time period
of oscillation of the system other way if I say the frequency at which you are transferring energy must be same as the
natural frequency of oscillation of the system when you transfer at that rate the energy transfer will be more
efficient the amplitude will increase this is called resonance okay this is called resonance okay so several time
the past paper they ask what is resonance so how do we Define you understood the you have got the picture
this is I just took an example of oscillation of a simple pendulum the same thing is true for electrical
vibrate also when you think about electrical vibrator with a spring Mass system here
also the whole system is oscillating here also the electrical vibrator is vibrating forcing the string Mass system
to oscillate there are also the same idea the the vibrator when it has the period of transfer of energy you know
vibration means transfering energy it's a vibration is it so during the vibration the spring Mass system is
gaining energy from the vibrator here also if the time period at which it's transferring energy is equal to actual
time period of oscillation of the spring Mass system which is 2 Pi root of m t 2 m k then the energy will be transferred
more effectively or more efficiently the energy will be transferred there other way if I say if the frequency of the
electrical vibrator becomes equal to Electric vibrator is transferring energy is it so the frequency of the electrical
vibrator becomes equal to natural frequency of the spring Mass system what will happen there are also energy will
be transferred more efficiently that is called resonance so it will ulate with large amplitude so you know the idea of
of uh what is the meaning of uh uh resonance that question is asked several time in the past paper resonance means
this is the way you should answer when the frequency of the driver frequency of the driver driver is my hand I am
transferring energy here the frequency of the driver that is the electrical vibrator frequency of the electrical
vibrator so this the answer when the frequency of the driver becomes equal to natural frequency of the driven system
maximum amount of energy will be transferred from the driver to the driven system and the driven system will
oscillate with large amplitude this is called resonance so I explain why it oscillates with large amplitude means
more efficient transfer of energy causes the increase in amplitude I hope you understood
now okay so this an external evidence for resonance that means the resonance occurs when the frequency of the driver
becomes equal to natural frequency of the driven system to show that uh we can use this experiment so there's an
electrical vibrator it's connected to a signal generator signal generator is an instrument that gives out ac voltage but
the frequency of the ac voltage is adjustable you can change the frequency of the ac voltage so the electrical
vibrator will vibrate at the frequency of the output of the signal generator so the electrical vibrator vibrate in this
direction this weights vibrates so spring Mass system is attached to the electrical vibrator so the spring Mass
system will be forc to oscillate at the frequency of the electrical vibrator electrical vibrator will vibrate at the
frequency of output of the signal generator you can see there's a display in this display we can see the frequency
of output voltage you can see here so for example if the display shows 20 HZ means the output voltage is 20 HZ so the
electrical vibration will vibrate at 20 HZ spring Mass system will be forced to oscillate at the same frequency of uh 20
HZ okay so here there's a ruler this is a set Square to ensure the ruler is in vertical okay so when there is no
oscillation small point is attached to the mass so when it is oscillates the mass will move up and down we can find
the amplitude of oscillation by using this point okay before you switch on the signal generator keep the sign object at
a off State and pull the mass through small distance and let it oscillate uh find the time period of oscillation how
long it takes to complete 10 oscillations or 15 oscillations so divide the total time by if you are
measuring the total time for 15 oscillation divide the total time uh of oscillation by number of oscillations
that is 15 you'll get the period of oscillation repeat this Experiment three times and find the average period of
oscillation ation you know that experimentally 1 / T is the natural frequency of the spring Mass system so
find the F not natural frequency of the spring Mass system find it experimentally okay now switch on the
electrical vibrator uh and the signal generator switch on it so start the experiment
with lower frequency of signal generator possibly whatever the lower frequency you can get it in your signal generator
start with that maybe 2 Herz or something like that for for that particular low of frequency of uh
oscillation measure the amplitude of oscillation by using the ruer so you are going to change the frequency of the
electrical vibrator frequency of oscillation of the electrical vibrator by changing the frequency of output
signal of the signal generator so you can calulate it so change the frequency of the electrical
vibrator and measure the amplitude of oscillation not the displacement amplitude of oscillation so you know
when the point is at rest take the reading when it oscillates up to what distance it moves and then turn that
record that reading subtract this from this you will get the amplitude so for different frequency of oscillation of
the electrical vibrator measure the or read the corresponding or relevant amplitude of oscillation plot a graph
now plot a graph of amplitude of oscillation against frequency of of the electrical vibrator that is the
frequency of uh output of the signal generator you can get it from the display of the signal generator you will
get a shape of graph something like this you will get it that means I let a sharp little bit sharper graph you will get it
okay so now you know that the amplitude increased then decreased so get the relevant value which related to the
maximum amplitude and read the read get the reading from the graph you will see this is the frequency of the signal
generator frequency of the vibrator electrical vibrator you will see the frequency of
the vibrator when it is equal to F not that is the natural frequency of the string Mass system you will get the
largest amplitude of oscillation why that happens Energy starts more efficiently that's a reason due to
efficient transfer of energy the increase I already explained so this is a good experimental evidence for
resonance okay so this is another experimental evidence that is called Boton pendulum it's simple actually even
you can do it at home uh take a hor a string and keep it under tension with two supports and there are five
different symbol pendulums are attached with different lens uh P1 P2 P3 P4 have different length of strings they are
simple pendulums uh P not is another pendulum that has same length as P3 so the length of P not say if I say the
length this is L1 the length of this is L1 this is L2 L3 L4 and this length is uh L KN the length L KN is equal to to
length L3 that's the way it's made uh these pendulums so both of them will have the same natural frequency we know
that the natural frequency or the time period of oscillation given by T = 2 pi s Ro l g so that frequency is given by F
= 1 / 2 piun of G / l so both have the same length means p and P3 pendulum have same length Lal L3 means both of them
will have the same natural frequency now this will be used as driver by keeping all these pendulum at rest all are
connected to the same string which is under tension uh not much tension but keep it little stretched uh by keeping
all the pendulums at rest pull this pendulum out of the board and let it oscillate so the pendulum not going to
oscillate this way it's going to oscillate this way into the boat out of the boat that plane it's going to
oscillate so when it oscillates you can see after a few seconds all these tends P1 P2 P4 will show very little amount of
oscillation but P3 will oscillate with larger amplitude it will oscillate with larger
amplitude generally the mass of P the mass of the b p is much larger than mass of P1 P2 P3 P4 normally The Bobs of P1
P2 P3 P4 are made of normal C or very light Mass this is a metal Mass so what happens when it oscillates the string is
attached to the horizontal string so this string the vertical string of the P not oscillates the where it is connected
to the horizontal string so it will force the horizontal string to oscillate at the same frequency as this frequency
so this horizontal frequency uh this horizontal string is oscillating at the frequency of natural frequency of P not
so what happens these all four pendulums will be forced to oscillate at that frequency for example if I say the
frequency of P IS F and the natural frequency of P1 is fub1 this is FS2 this is F3 but F3 = F
so F3 but F3 is equal to F because same length this is F4 the frequency natural frequency so since this string is
attached to the horizontal string when the pendulum be not oscillate this point where it is attached that will force the
horizontal string to oscillate at the frequency F not so all the four string strings are attached to that horizontal
string so all those pendulums are forced to oscillate at the frequency of f KN by the horizontal string now what will
happen this has the same natural frequency of this one this is the driver frequency of the driver is equal to
natural frequency of the driven system P3 P1 P2 P3 P4 all are driven systems they are forc oscillate but this natural
frequency equal to this frequency so maximum amount of energy or large amount of energy will be transferred from this
string to this pendulum so this pendulum P3 will oscillate with larger amplitude that also a good example for uh
resonance okay so next thing is damping or damped oscillation okay you can see that when you p a simple pendulum and
leave it it will oscillate so after several oscillation it comes to rest but during the oscillation the amplitude
gradually decreases why this happens due to work and against friction work and against drag Force so the losing the
energy of the oscillator uh due to work done against the drag force causes the amplitude to
decrease this phenomena this type of oscillation is called d damping or damped oscillation not only due to work
against friction if the system consists of uh like a d ductile materials uh they undergo plastic deformation during the
oscillation they absorb energy to deform and not returning the energy back then there will be uh loss of energy of the
mechanical energy will be lost because there's work done to uh deform the plastic material ductile material so the
amplitude will decrease so normally they ask in the exam what is damed illation so damed illation you can see dabing is
the dissipation of energy of a oscillating system due to friction or due to plastic deformation of ductile
material that causes decreasing amplitude is called damp illation easy to remember that that is the answer you
should give when they ask what is damped oscillation again I'm telling so damped illation means dissipation of mechanical
energy of an oscillator due to friction or due to a deform plastic deformation of ductile material that causes
reduction in the amplitude is called damed oscillation okay so the damed oscillation can have different types the
most well-known oscillation is called uh under Dam so there it's a repeated oscillation but amplitude
gradually decreases there the amplitude falls on an exponential curve something like this you can draw a graph like this
is displacement Against Time so the graph could be something like
this so the period of oscillation Remains the Same very important in this type of under uh this type of under
damed oscillation the period of oscillation Remains the Same the period of oscillation this time period is same
as this and this the time period Remains the Same but the amplitude here is a not here the amplitude is
A1 here the amplitude is 82 and here the amplitude is a I'll mark it here this amplitude is
A3 okay so the amplitude falls on an exponential curve this is an exponential curve under Dam ill so in under D this
is an exponential curve so that type of damping shows several oscillations where the amplitude will
decrease the amplitude will fall on an exponential curve so there we can show that since these Peaks are falling on
exponential curve we can show that the derivation is not necessary but remember that they might ask uh that the Peaks
are falling on exponential curve so if they are falling on exponential curve if the Peaks are on the exponential
curve so then a/ A1 we can derive it but you don't need so I not doing it a the ratio of the amplitudes must be same a
A1 isal A1 A2 is equal to A2 over A3 and so on so if they ask you to show or check whether the PS are falling on an
exponential curve find the amplitude here read it from the graph a A1 find it then A1 over A2 find it a23 if they are
almost same we can say the Peaks are falling on an exponential curve so good example for this type of daming symol
pendulum spring Mass system they oscillate and the amplitude gradually decreases
there are two more different types of damped oscillations one is called uh critically damping other is called over
daming critically dabing means uh it won't complete even half an oscill even 1/4 of oscillation it will come to the
equilibrium position during very short time so this is displacement this is time so if it is
critically damp oscillation critically D it will come to rest or come to the equum position during a short time if
initial displacement this much it will come to the equ position in a shorter time it's a curve so it come to the equ
position in a shorter time so the applications are there for this the Good application is uh in a analog meters
analog volt meter and Amer because when you you know the in analog meters like a vol met meter the pointer is hanging
from a very sensitive very mind M spring when you apply a voltage or when current pass through it there's a force exerted
on the coil so the coil rotates so the point turns but it comes to rest immediately the point at which it wants
to show the raing it won't oscillate about the point so the new equilibrium position when current flows is the
position where it comes to rest but there it immediately come to rest without showing any oscillation so that
is the new equilibrium position it comes to rest in a very short time uh and uh without showing any uh oscillation so
that is a good example for application of critically damping other one is over damping over damping is something like
this it takes long time but it won't show more than 1/4 of oscillation it comes to rest but takes longer time than
this something like this that good example for damping of uh shock absorbers in Vehicles because if they
come to equum position in a shter time it can cause jerk to the passenger so they when they pass over a bump it comes
to the equum position taking more time so it can avoid unwatered jerk uh shock to the jerk to the passengers so that is
this is critically damping this is uh over damping applications are there okay so next is tuned Mass damper
now tuned Mass damper means it's actually a system it's made by two layers of uh maybe Metals between that
there will be lot of Springs kept so that is called T Mass Dam like a w first two metals between that there are many
Springs are kep for this system it has a natural frequency it's made like this normally they keep this tune Mass damper
uh for uh they are used to reduce the unw oscillation of overhead Bridges so it's normally kep the pillar this is the
pillar this is the bridge so they keep this t m dampers somewhere between the bridge and the pillar between that they
keep the T Mar ders okay when the vehicles goes if there's two to some reason if the bridge oscillates it's
made like this the natural frequency of the bridge in case if the bridge is oscillates the natural frequency of the
bridge is sorry the tune Mass damp has natural frequency the natural frequency of the Mass dam is almost equal to the
natural frequency of the bridge system so when the bridge oscillates due to the vehicle's movement uh the bridges could
be forced to oscillate so when the bridge oscillates it's resting on the tune Mass damber so the mass Dam will be
forced to oscillate then what will happen resonance will happen due to Resonance energy will be transferred
from the bridge to the Tue Mass Dam so the bridge will lose its energy because it's transferring maximum amount of
energy to the T dber because bridge and the T M dber have same natural frequency the energy will be transferred or lost
or desicated from the bridge to the tune Mass dampers and the tune Mass dampers will dissipate that energy to the
surrounding without transferring energy back to the bridge they should not transfer energy back to the bridge
that's the way the technology so they will lose the energy to the dissipate the energy to the surrounding without
transferring energy back to the bridge so the bridge will lose the oscillation energy and uh it can uh reduce the
amplitude of oscillation or the oscillation could be seized it could be stopped by transferring energy to the
tune Mass damber the basic technology is the resonance there both have the same natural
frequency so there's a question in the past paper I can't remember the year the sound produced when the drum is truck
May persist for a longer time too long and so daming is used some drummer attach strips of gel to the drum
membrane this is the drum membrane or drum skin uh the gel is able to deform plastically and hence shorten the time
that the drum sounds so sometime when you beat the drum the skin or the membrane can vibrate to longer time than
the expected time so they want to reduce the oscillation so they put a strip of gel and the question explain how a gel
that can deform plastically is able to produce damping okay so it's actually a thre
mark question this question based on three marks past paper question okay what would be the answer first you
should say when the drum deform sorry when the drum skin vibrates the gel is forced to oscillate
and gel absorbs the energy for its plastic deformation without transferring energy back to the uh membrane or to the
skin therefore energy is now you know that energy is absorbed from the because it's kept on the skin or the membrane so
when the Deane vibrates the gel is forced to vibrate so when the gel is vibrate it will deform the deformation
is plastic not Elastic Plastic so which what is the origin of from where the energy is used to deform the gel
plastically energy of the vibration of the drum the mechanical energy of the skin or the membrane of the drum is used
to deform the gel plastically it's a plastic deformation you know plastic deformation means permanent deformation
you learned that in unit one so due to the plastic deformation the energy will not be given
back to the skin because whenever there's a plastic deformation energy will not be given back it won't come
back to the original shape so the energy will not be transferred back to the skin therefore the vibration of the skin will
be reduced during a shorter time so the answer if you are giving Point form one Mark is given for saying the
gel will have plastic deformation plastic deformation means permanent deformation and it will absorb energy
from the skin of the drum since the deformation is plastic energy will not be transferred back to the skin and
energy will be dissipated third Mark energy will be dissipated or lost from the the skin so the vibration will be
stopped that's the answer three months okay next question when a ship is sailing on a rough sea the waves can set
uh the ship into simple harmonic motion shm simple harmonic motion short form uh at one position on a ship passengers
experience a vertical oscillation of amplitude of 0.85 M with a period of uh 6 seconds with a period of 6 seconds
first part uh calculate the maximum acceleration of the passenger so we know that a Max is equal
to Omega S A we know AAL Omega s x but a becomes maximum X becomes maximum X is maximum for
amplitude so Omega s x so there Omega isal to 2 Pi / T we know that so this is going to be 2 Pi / T 6
seconds all in squared amplitude is given 085 so you will get
0.932 m per second squar okay the second part the graph shows how the vertical displacement X of
the passenger varies with time T add to the graph to show how the acceleration of the gra passenger varies over the
same time so the reference point we don't know which one they take but anyway you know in uh unit one you would
have learned in displacement time graph uh any point could be taken as a reference point but here the reference
point they are not telling it's not the equilibrium position if they take it as equilibrium position then the graph
would have would have both positive and negative axis anyway they would have taken some of the point as a reference
point when they are taking uh the displacement the displacement is throughout the motion positive but the
displacement is increasing and decreasing in a shape of s or cosine whatever it is but when you think about
the acceleration acceleration is always towards the equilibrium position so when the passenger goes above the uh equum
position the access should be towards the equ position below the equum position also towards means the
direction of the acction will become opposite each so there the acction time graph will have both positive and
negative sides remember that so I already explained that to draw accession time graph from displacement time graph
it's exactly the inverted graph okay so there if I want to draw the displace accession time graph we'll draw the
relevant y the vertical lines so it will become exactly inverted graph with respect to Z Z so it will be
like this so here it's positive maximum so it should be Mir if I imagine this is the equum position then if I draw the
displacement diagraph about it will be like this positive negative like this so if I invert it about what shape I will
in see that will be the shape of the acceleration time graph inverted graph about time axis X is this is the time
axis okay so the graph will be this this is positive this is negative so here this is going to be maximum so it's like
this this is the graph for acceleration Against Time the blue color indicates
acceleration time graph either side of the uh origin okay so a passenger third part on the
ship stands on a weighing scale uh when the C is calm the reading on the weighing scale is uh 75 kog no illation
it's calm means when there's no illation it's 75 Kg draw a free body force diagram for the passenger so if I take a
passenger as a small dot I don't need to draw actual passenger so there'll be two readings uh sorry two forces acting on
on it one is the weight of it pulled by the earth that is the weight that is
mg then the normal reaction that is pushed by the weighing scale on the passenger that is pushed by weighing
scale or normal reaction that is R okay that's the answer but if you want to analyze
further what will be the reading which force is read by the weighing scale if I draw the weighing scale here so weighing
scale leads the push exerted by the passenger on it so the passeng actually the weight is the pull by Earth Earth is
pulling the passenger down the third L will act on Earth upward Direction you learn that in unit one but passenger is
standing on the wing SP so the passenger will exert a force on the wing scale that is downward pushed by the passenger
so that is R when the passenger pushes the W scale down Wing scale push the passenger upward Direction so these two
forces are the normal reaction Wing scale read the r remember that the rating of the wing scale is R okay the
normal reaction on the third law pair of the normal reaction on the passenger is pushed by the passenger on the W scale
that will be the reading of the W scale okay so on r c the sheep oscillates with a large amplitude explain why the
reading on the weighing scale will vary so we drew the free body force diagram already for the passenger there are two
forces the weight acting on it and the normal reaction are pushed by the weighing scale the weighing scale reads
the third law pair of r i simp I can see the wi skill reads the third LW pair of r or it read the normal reaction no
problem okay it's oscillating so you know that so it will have resultant for say for example when there is no
oscillation when the C is calm this is the level we assume this is the level when it is not oscillating this is the
level of the water or level of the weighing scale when the passenger stands on it at equilibrium say imagine when
the ship is at a calm sea no oscillation so the sea level is oscillating between this level
and this level when it is here when the C is at here or the the the weing scale is at that either way I can say the C
Level or the weighing scale is oscillating between this position and this position it's as oscillating up and
down when there is no oscillation when the C is calm the weing scale is at this so this is the equilibrium
position when the weing scale is here at this position also the two forces acting that is
mg are the two forces acting here also when it is here also the same two forces acting but the magnitudes are
different we know that the oscillation of the we scale or the oscillation of the C is simple harmonic so when it is
here the resultant Force should be towards a% that is FAL ma resultant Force FAL ma we know that if it is
simple harmonic motion always the acceleration should be towards the equilibrium position means resultant
force and acceleration of parall vectors mass is a scalar so if it is a simple harmonic motion acction must be towards
the equilibrium position means resultant Force must be towards the equilibrium position so when it is above the
equilibrium position these are the two forces acting the resultant Force must be towards the equilibrium position that
means mg must be greater than R mg must be greater than r r is the radi mg is the weight weight of the passenger never
changes that is due to pull by Earth that remains constant so R will become smaller than mg because mg becomes
larger means mg won't change R changes so R becomes smaller than mg so the resultant since the resultant force is
towards the equum position when it is at this level below the equum position it's oscillating up and down so there is an
equilibrium position that is this when the weighing scale come to the lowest position there the resultant Force
should be towards the equum position because acceleration must be towards the equum position if the alation ism simple
harmonic motion so resultant Force must be towards the equilibrium position so in that situation mg remains constant R
becomes greater than mg so at this position when it is at this position above the equum position where in this
one R is uh less than mg so the reading will become smaller than uh lower than the weight of the passenger when the
passer is at the equ position we know that AAL minus Omega s x x is measured from the equilibrium position at the
equum position x is 0 a0 a0 means resultant for 0 that means at the equilibrium position the reading will be
equal to mg so at the equum position Ral mg reading will be equal to the actual weight of the
passenger when it is below the equum position R must be greater than mg so the reading reading is r i told that
already reading is R reading of the W scale R will become greater than mg this is the reason for change in the reading
so you can write it simply I'm not writing it you can say first point you can say this actually a three mark
question but we can write more clearly there are enough lines are given you can see the weighing scale reads the third
law pair of the normal reaction you can see normal reaction of the passenger or you can say we scale reads the push by
the passenger which is capital r then you can see when the passenger is at the equilibrium position or the wi scale is
at the equilibrium position there is no resultant force reading will be equal to actual weight of the passenger then you
should say always the ACC should be towards the equilibrium position means resultant Force must be towards
equilibrium position therefore when the passenger is above the equilibrium position resultant Force must be towards
the equilibrium position therefore R will become smaller than mg reading will become smaller than
mg when the passenger is below the equum position also the resultant Force must be towards the equium position therefore
R will become greater than mg the reading will become greater than mg that's all you have to write
hey I wrote The Answer shortly here weighing scale reads the push by the passenger on the scale R so you already
Mark R thir L as that at the no acceleration so r equal mg so the reading will Beal mg above the equum
position resultant Force FAL mgus r mgus r uh must be towards the equum position uh it must be uh must be be towards the
equilibrium position uh and hence and and hence R must be less than mg then only
the force will be towards the equilibrium position below the equum position uh also resultant Force F
towards the equum position which is upward you know that hence FAL R minus mg so there what happens R should be
greater than mg So reading will become greater reading will be equal reading will be less three position I found
it okay the last part C part third part C part will the passenger is standing on the we scale and the ship is oscillating
the maximum acceleration of the ship is 0.70 M second Square due to oscillation not the motion the oscillation causes
maximum acceleration of 0.70 m/s s at calculate the maximum reading on the weighing scale already we I told that
when the passenger is below the AC this AUM when the passenger is below the equum position uh this is the weight
this is the normal reaction R will be greater than NG so the maximum ROM occurs below the equilibrium position
above the equ position reading will decrease when it goes below the equ reading will increase but maximum occurs
when the acceleration is maximum because the resultant Force here F towards equilibrium position f is = to r - mg is
= to M so that is R is = to mg + m a so R Max occurs so this is R Max occurs the reading is the maximum means weight is
constant when the acceleration becomes maximum M K Max you can ask me where the maximum ACC occurs at the extreme
position when it goes to the lowest position maximum displacement lower position lower position accident will be
maximum so now find it weight of the passenger that is when there is no oscillation when the the C is calm r
equal mg because acceleration is zero atance so that is given 75 Kg so 75 into 9.81 + 75 into
0.70 so R Max you will get uh 788 3 Newton but the reading is in kilogram So reading in Newton this one so reading
in kilogram means I need to convert to kilogram so run 88.3 / 9.81 kilog So reading maximum so the
maximum reading I'm getting 80.4 kg that is the maximum reading okay okay so that's the end of
uh this oscillation is a long topic but I think I have done everything without missing any topic okay you can pass your
comments bye
Heads up!
This summary and transcript were automatically generated using AI with the Free YouTube Transcript Summary Tool by LunaNotes.
Generate a summary for freeRelated Summaries

Comprehensive Guide to Periodic Motion and Spring-Mass Oscillations
Explore the fundamentals of periodic motion through detailed explanations of mass-spring systems and simple harmonic motion. Understand restoring forces, energy transformations, motion equations, and effects of damping and resonance, supported by practical problem-solving examples.
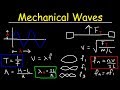
Mechanical Waves Explained: Amplitude, Frequency, Wavelength, and Harmonics
This video tutorial provides step-by-step solutions to fundamental mechanical wave problems, including calculating amplitude, wavelength, frequency, period, and wave speed. It also explains harmonic frequencies on a string, providing formulas and examples to understand wave behavior in physical systems.
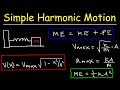
Solving Simple Harmonic Motion: Energy and Spring Calculations Explained
This video tutorial breaks down a simple harmonic motion problem involving a spring-block system. Learn step-by-step how to calculate the spring constant, amplitude, maximum acceleration, mechanical energy, maximum velocity, and velocity at specific displacements with clear formulas and examples.

MCAT Physics Waves & Sound: Comprehensive Chapter 7 Summary
Explore key concepts of waves and sound for the MCAT, including sinusoidal waves, wave properties, Doppler effect, and sound intensity. Understand wave types, interference, standing waves, and applications like ultrasounds with precise equations and examples for effective exam preparation.
Understanding Motion: A Comprehensive Guide
Dive deep into the concepts of motion, speed, and velocity, along with practical examples and clear explanations!
Most Viewed Summaries

A Comprehensive Guide to Using Stable Diffusion Forge UI
Explore the Stable Diffusion Forge UI, customizable settings, models, and more to enhance your image generation experience.

Kolonyalismo at Imperyalismo: Ang Kasaysayan ng Pagsakop sa Pilipinas
Tuklasin ang kasaysayan ng kolonyalismo at imperyalismo sa Pilipinas sa pamamagitan ni Ferdinand Magellan.

Mastering Inpainting with Stable Diffusion: Fix Mistakes and Enhance Your Images
Learn to fix mistakes and enhance images with Stable Diffusion's inpainting features effectively.

Pamamaraan at Patakarang Kolonyal ng mga Espanyol sa Pilipinas
Tuklasin ang mga pamamaraan at patakaran ng mga Espanyol sa Pilipinas, at ang epekto nito sa mga Pilipino.

How to Install and Configure Forge: A New Stable Diffusion Web UI
Learn to install and configure the new Forge web UI for Stable Diffusion, with tips on models and settings.

If you found this summary useful, consider buying us a coffee. It would help us a lot!